

Multi-dominant-factor remote operation method shared by two persons
A teleoperation and factor technology, applied in the field of space teleoperation, can solve problems such as human instability, insufficient intelligence of space robots, and affecting the quality of teleoperation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Below in conjunction with accompanying drawing, the present invention is described in further detail:
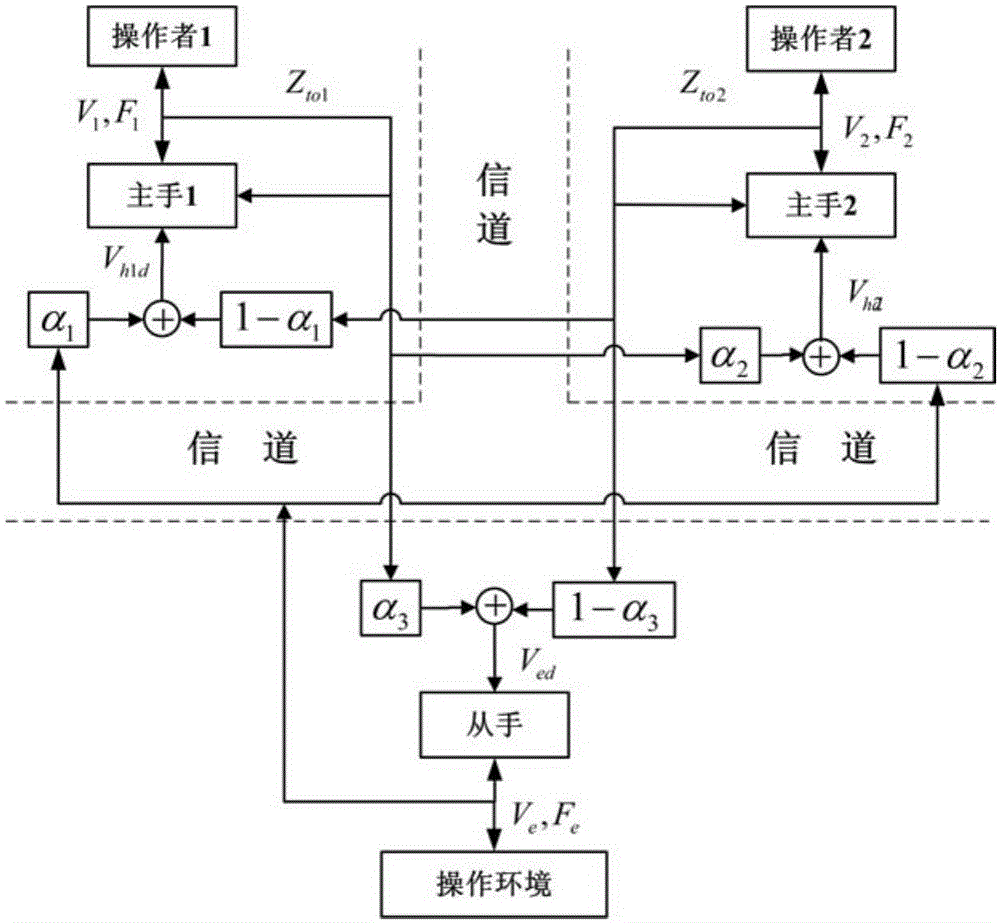
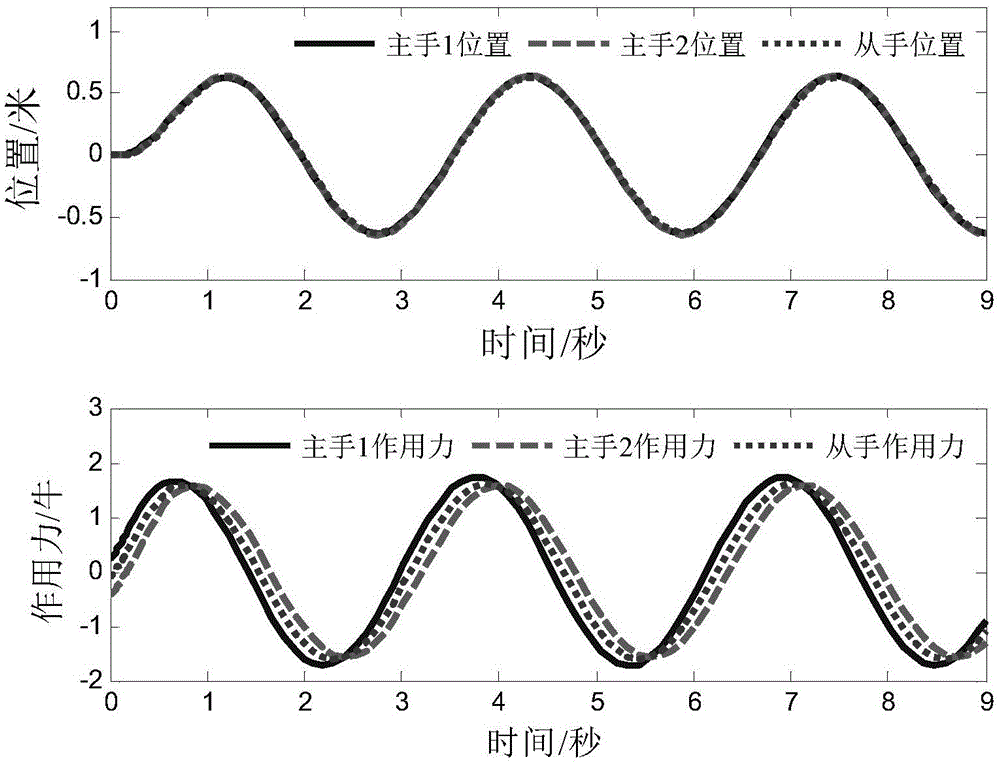
[0049] see figure 1 and figure 2 , the present invention a kind of multi-advantage factor two-person shared teleoperation method, comprises following four steps:
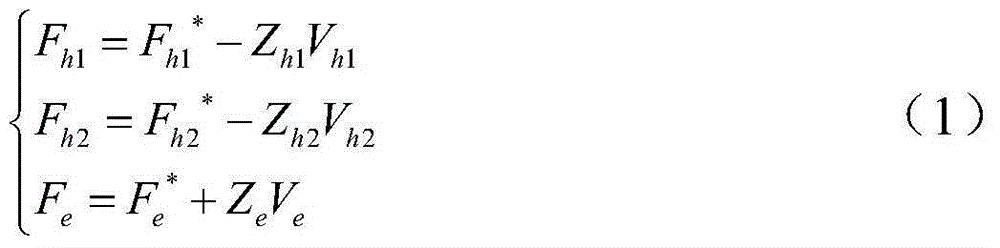
[0050] 1. Establish the dynamic model of the master-slave robot:
[0051] F h 1 = F h 1 * - Z h 1 V h ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More