

A Two-Person Shared Teleoperation Method with Multi-Advantage Factors
A technology of teleoperation and factor, applied in the field of space teleoperation, can solve the problems of unstable human beings, insufficient intelligence of space robots, affecting the quality of teleoperation operation, etc., and achieve the effect of high reliability and accurate control precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] Below in conjunction with accompanying drawing, the present invention is described in further detail:
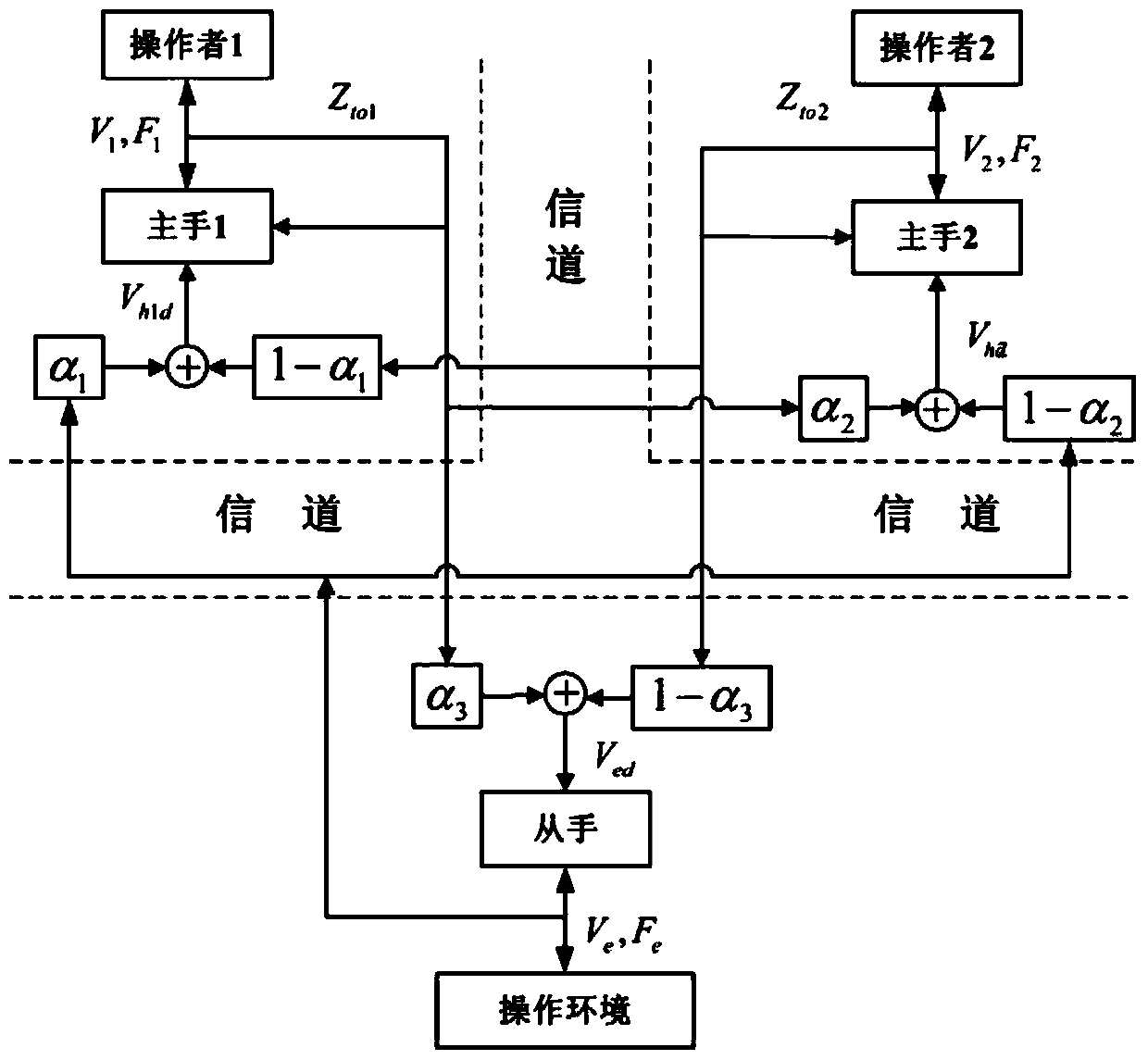
[0049] see figure 1 and figure 2 , the present invention a kind of multi-advantage factor two-person shared teleoperation method, comprises following four steps:
[0050] 1. Establish the dynamic model of the master-slave robot:
[0051]
[0052] Among them, F h1 and F h2 is the force of operator 1 and operator 2 on main manipulator 1 and main manipulator 2, F e is the force of the environment on the slave end, F h1 * and F h2 * Respectively, the actual control force of the operator, F e * is the actual force of the environment, Z h1 ,Z h2 and Z e are the impedance of the operator and the environment, respectively, V h1 , V h2 and V eare the velocity variables for the operator and environment effects, respectively.
[0053] In the task space model, establish a dynamic model of the operator and the environment
[0054]
[0055] Among them, Z m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More