

Saturation problem moving body attitude event-triggered control method with actuator
A technology of event triggering and control method, applied in attitude control and other directions, can solve the problem of excessive data load of the control system, and achieve the effect of ensuring asymptotic stability, fast response speed, and ensuring system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] Below in conjunction with accompanying drawing, each part design method in the present invention is further described:
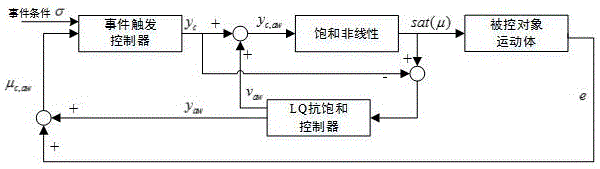
[0085] The present invention "a motion body attitude event trigger control method with actuator saturation problem", see figure 1 As shown, the specific steps are as follows:
[0086] Step 1: Given expected tracking value
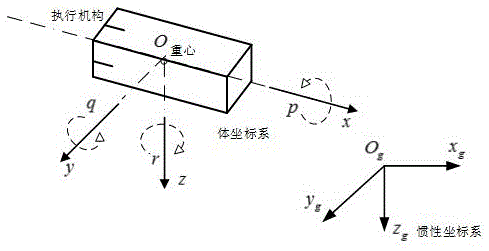
[0087] 1) if figure 2 As shown, the body coordinate system is established with the center of mass of the moving body as the origin ;Establish an inertial coordinate system with any point on the ground as the origin , where the origin For any point on the ground, pointing north, pointing east, point to the center of the earth;
[0088] 2) The given expected attitude angle is , which can be a function of time or path , can also be a fixed value ;
[0089] 3) Given the desired speed as , which can be a function of time or path , can also be a fixed value .
[0090] Step 2: Calculate attitude angle trackin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More