Fast aerial alignment method of rotating guided projectile based on previous data
A technology of pre-data and artillery shells, applied in the field of rapid aerial alignment of rotary-guided artillery shells, which can solve the problems of long filtering period, large disturbance and low alignment accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
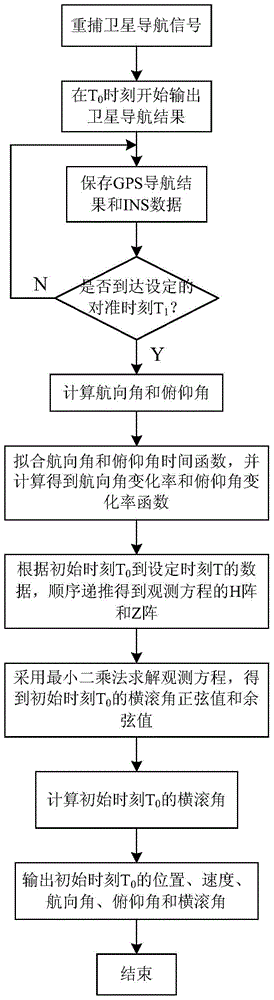
[0158] In this embodiment, after the guided projectile is launched, the GPS signal is recaptured. After the capture and tracking is realized and the navigation result is output, the GPS navigation result and INS data are saved, and when the set alignment time is reached, the initial alignment.
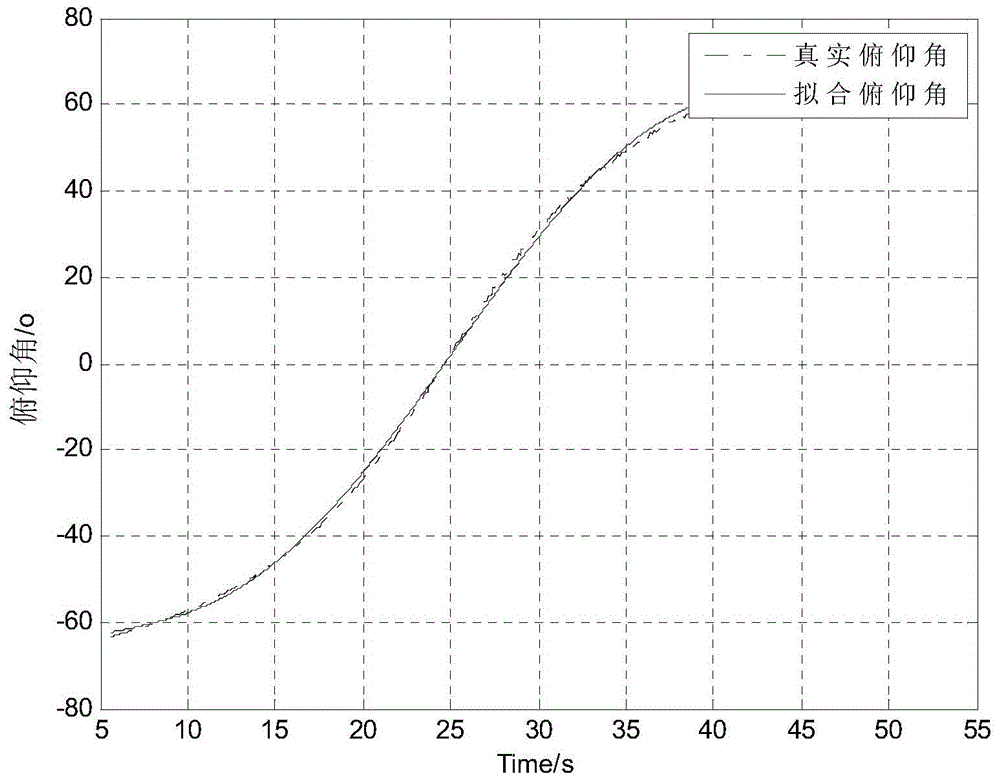
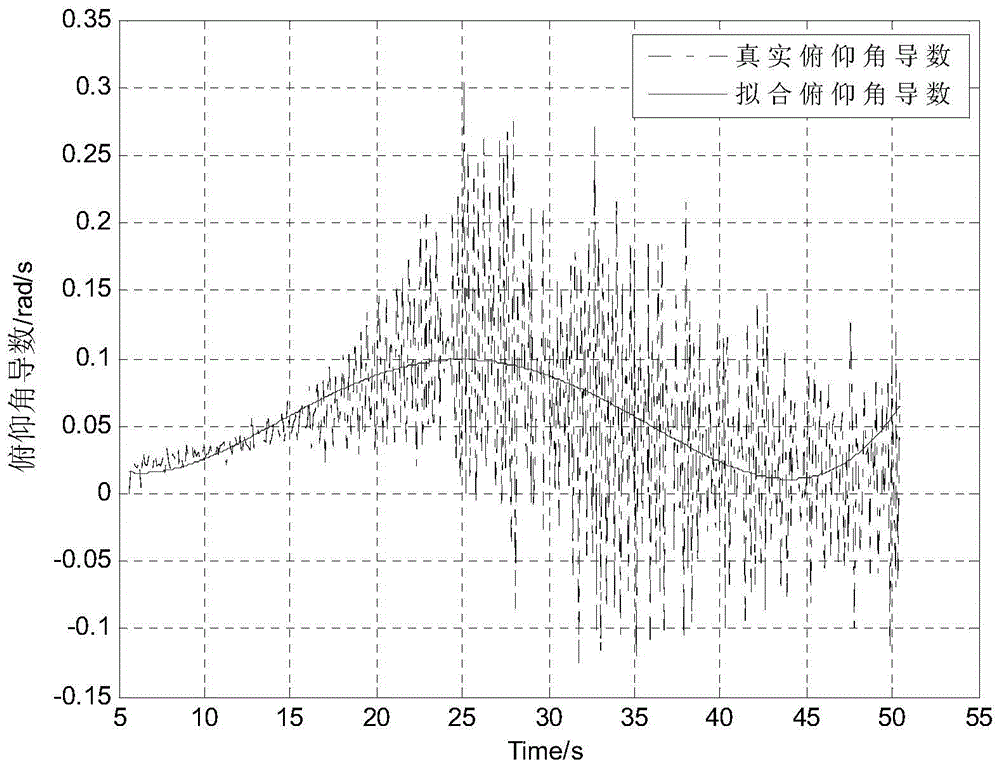
[0159] in, figure 2 is the pitch angle calculated according to the rate output by GPS, and the fitted pitch angle curve. From figure 2 It can be seen that the pitch angle varies in a large range during this process. image 3 It is the pitch angle change rate curve calculated according to the derivation of the pitch angle fitting curve, from which it can be seen that the noise of the pitch angle change rate is relatively large, and the noise is reduced after fitting. Figure 4 The heading angle calculation curve and fitting curve are shown in , and it can be seen from the figure that the heading angle is almost unchanged. Figure 5 is the heading angle change rate curve, from whic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



