

Non-overshot fractional order time-varying sliding mode control method
A control method and fractional-order technology, applied in the field of control, can solve problems such as not attracting extensive attention in the engineering community, and the integer order model cannot well describe the dynamic behavior of viscoelasticity and diffusive systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0062] Consider the system:
[0063] D 2 x=u+du
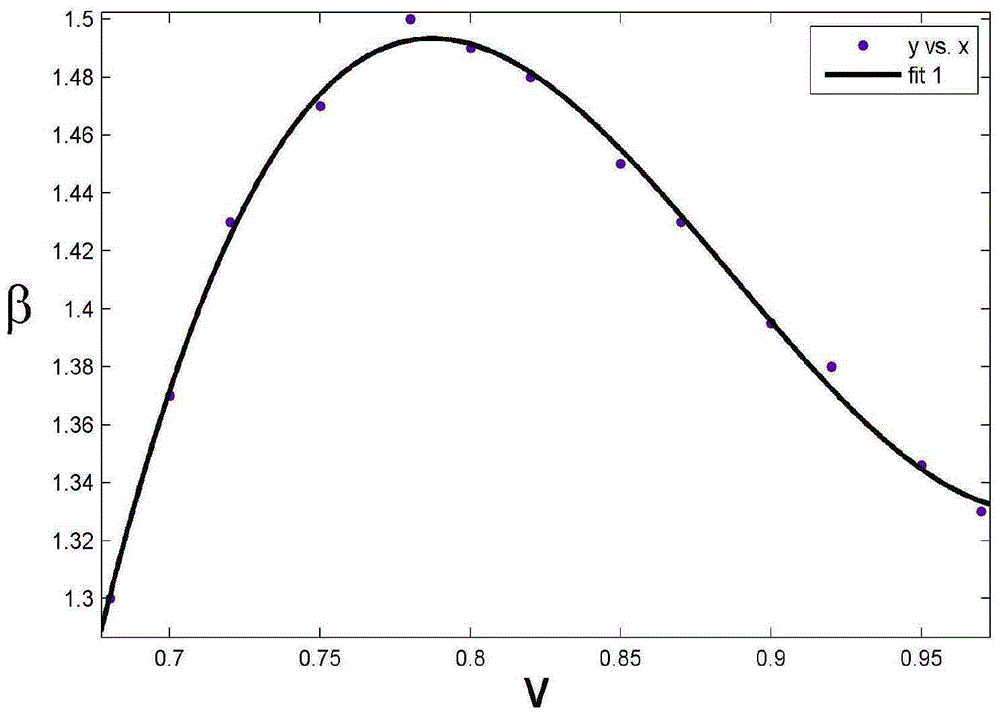
[0064] Let the sliding mode surface coefficient n=2, v=0.8, the controller parameter η=50000, the initial state of the system is x=0, and the tracking command of the system is x d =1, the disturbance parameter of the controlled object is du=2*cos(5t)+sin(2.5t). Time-varying terms A=-1, B=10.
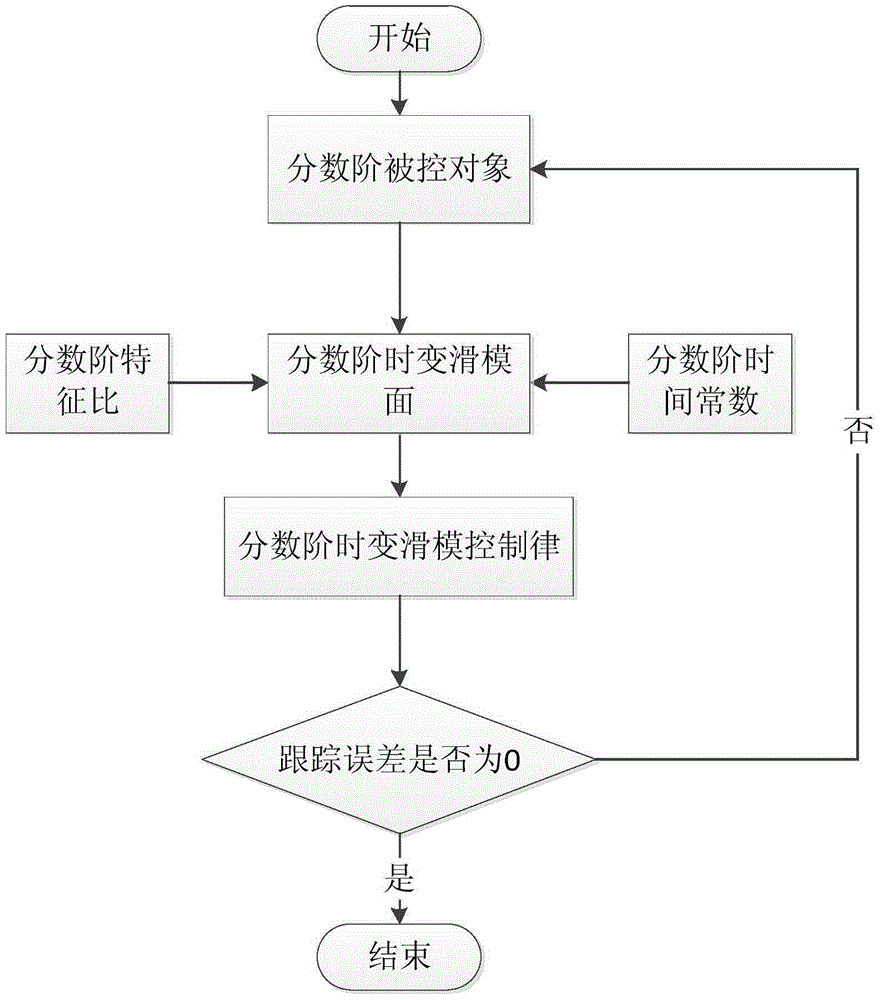
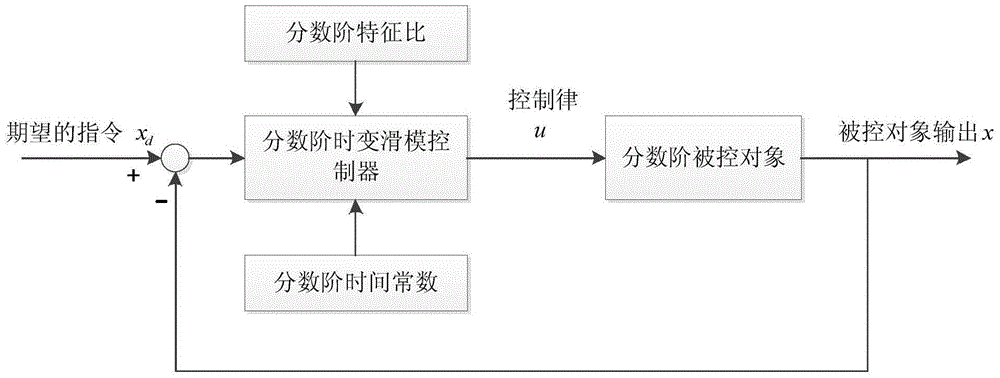
[0065] The present embodiment discloses a fractional time-varying sliding mode control method without overshoot, which specifically includes the following steps:
[0066] Step 1. Establish a dynamic model of the fractional-order uncertain system.
[0067] D 2 x=f(x)+g(x)u+du(1)
[0068] In the formula, x is the state of the system, f(x) and g(x)≠0 are smooth nonlinear functions about x, du is the external aggregate interference that the system receives, and the external aggregate interference is bounded |du|≤du max . D is the differential operator. u is the system control input. The reference trajectory of the system is x d .
[0069] Step 2. Des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More