

Rope-driven underwater detection robot
A robot and cable-driven technology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of reduced imaging detection quality, easy increase of water turbidity, and inability to achieve fast moving visual scanning detection, etc., to achieve improved Detection effect and sensitivity improvement effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples cited are only used to explain the present invention, and are not used to limit the scope of the present invention.
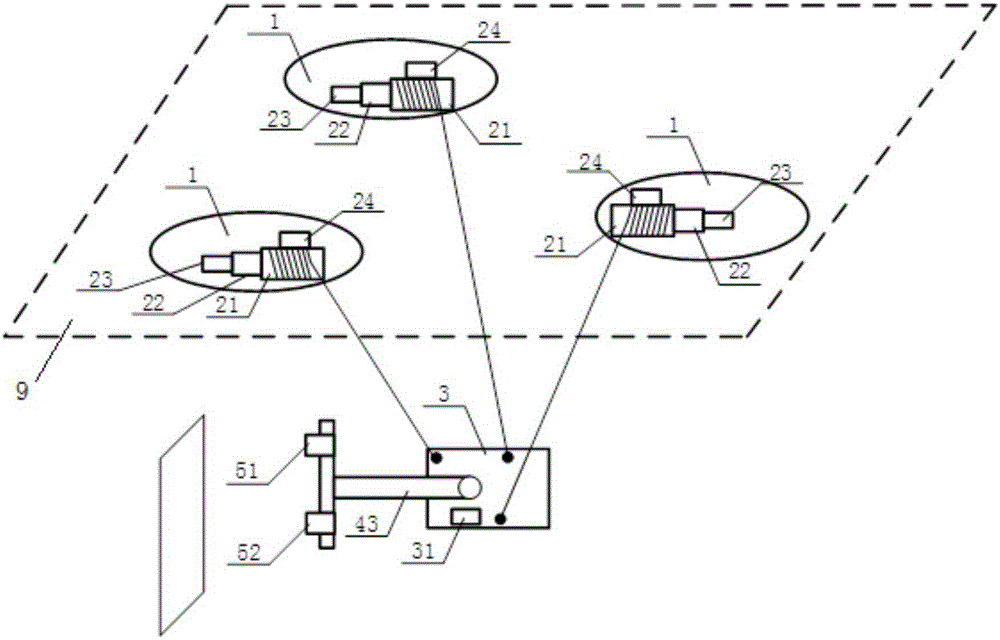
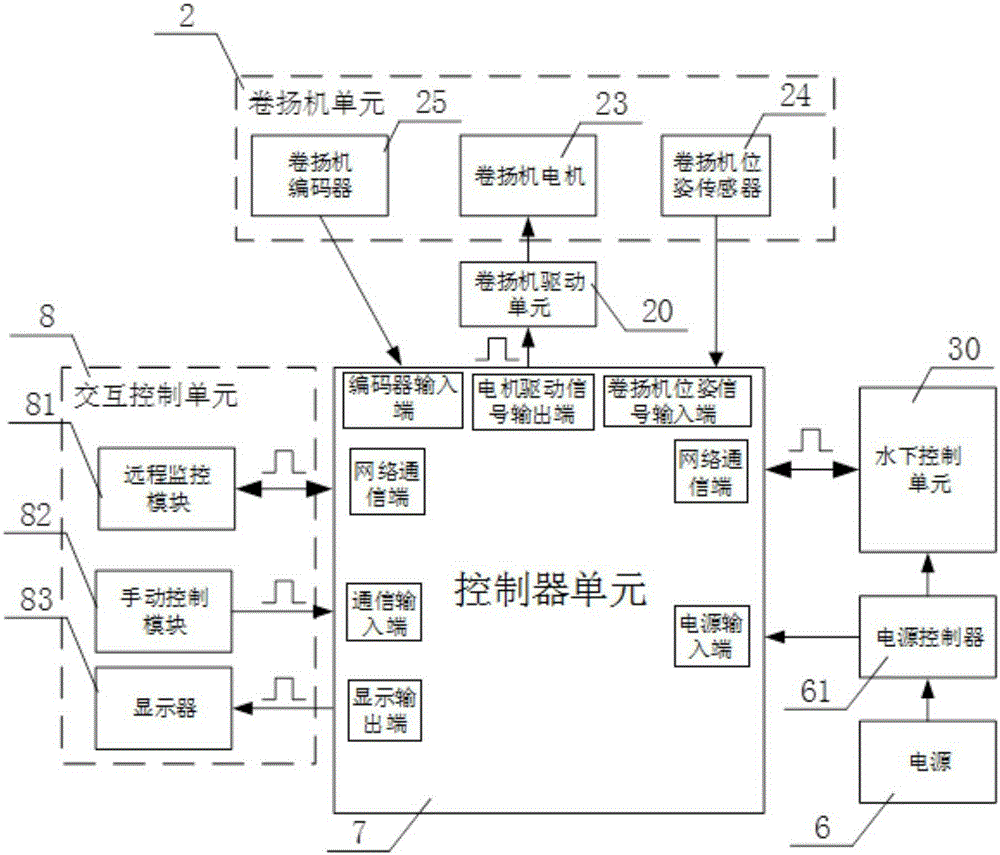
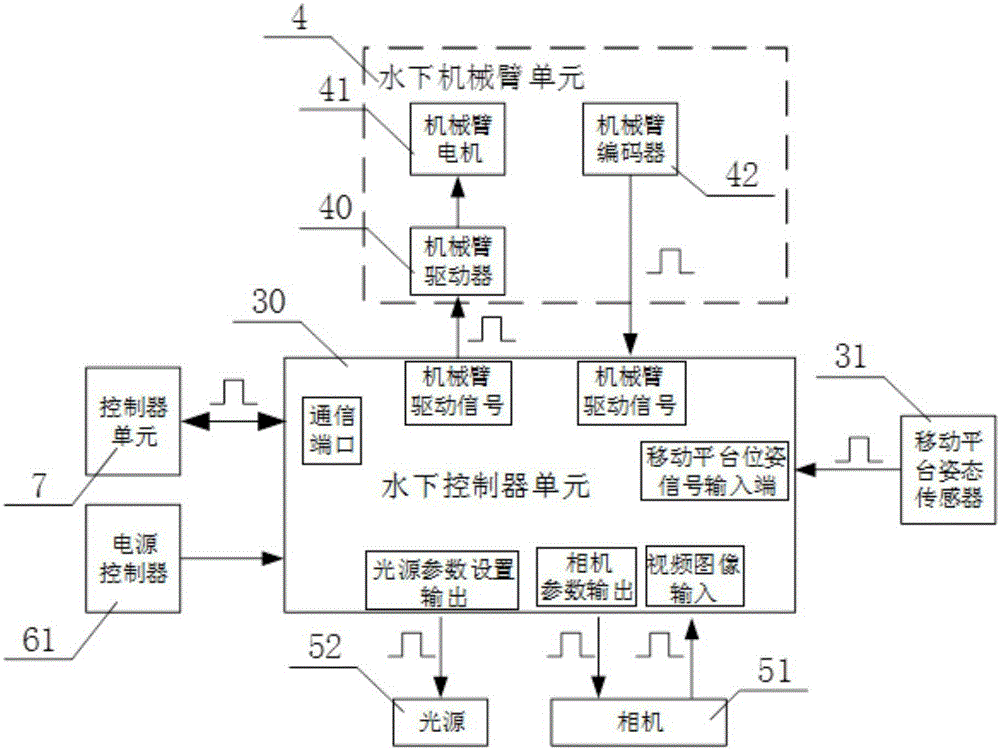
[0020] Such as figure 1 , figure 2 with image 3 As shown, a cable-driven underwater inspection robot includes at least one water platform 1, a winch unit 2, an underwater mobile platform 3, an underwater mechanical arm unit 4, a camera 51, a light source 52, a power supply 6, a controller unit 7, and Interactive control unit 8; the floating platform 1 is located above the water surface 9, at least one winch unit 2 is fixed on each of the floating platform 1, and the winch unit 2 includes a drum 21, a gear set 22, and a winch motor 23 , Winch pose sensor 24 and winch encoder 25; the reel 21 is connected to one side of the gear set 22, and the winch motor 23 is connected to the other side of the gear set 22; the winch pose ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More