

Unmanned plane capable of being automatically charged, charging system and charging method for unmanned plane
A charging system and automatic charging technology, applied in electromagnetic wave systems, secondary battery charging/discharging, battery circuit devices, etc., can solve problems such as inability to judge, increasing energy consumption and energy consumption of unmanned aerial vehicle round-trip flights
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
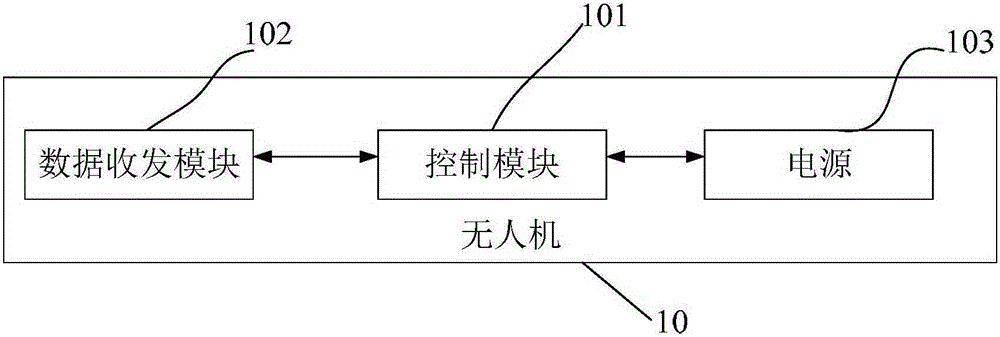
[0033] figure 1 It is a structural block diagram of the drone disclosed in this embodiment. Such as figure 1 As shown, in this embodiment, the UAV 10 mainly includes: a data transceiver module 102 for receiving control commands sent by the console (operator) and sending collected data, specifically, in this embodiment, the above-mentioned The data transceiver module is a wireless signal transceiver device; connected with the above-mentioned data transceiver module 102, for analyzing the data received by the above-mentioned data transceiver module 102 and controlling the operation of the unmanned aerial vehicle 10 according to the result of the analysis 101 Specifically, in this embodiment, the above-mentioned control module is a central processing unit; the power supply 103 connected to the above-mentioned control module 101 to supply the flying power of the UAV 10, and the power supply 103 can be recharged.
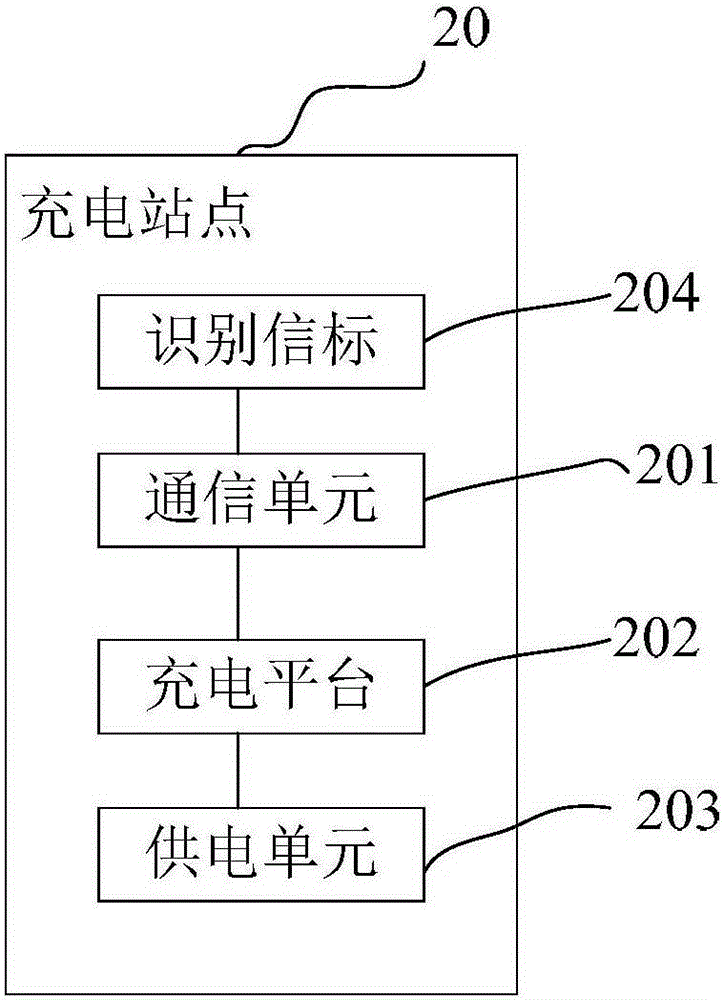
[0034] figure 2 It is a structural block diagram of the chargin...
Embodiment 2
[0058] The improvement of this embodiment relative to Embodiment 1 is that in this embodiment, in order to locate the charging stations more accurately, preferably, each charging station 20 includes a GPS unit, and the UAV 10 A GPS navigation module is also provided, so that when a suitable charging site 20 is selected, it is only necessary to send the GPS position information of the above-mentioned selected charging site 20 to the UAV 10, and the UAV 10 can then navigate in GPS. The module flies to the selected charging station 20 under the guidance of the module. In this case, the charging station 20 does not need to set an identification beacon, or in other words, at this time, the GPS information of the charging station 20 is equivalent to its identification beacon.
[0059] Other structures are similar to those in Embodiment 1 and will not be repeated here.
Embodiment 3
[0061] The difference between this embodiment and Embodiment 1 or Embodiment 2 is that in this embodiment, the above-mentioned UAV 10 is provided with a storage unit for storing the authentication code, and the above-mentioned charging station 20 is provided with a device that can verify whether the above-mentioned authentication code is Legitimate verification unit. In this way, a set of authorization authentication mechanism can be established between the drone 10 and the charging site 20, that is, a wireless handshake is required between the drone 10 and the above-mentioned selected charging site 20 to determine whether the above-mentioned drone 10 has obtained the above-mentioned The legal authorization certification of the charging station 20 ensures that the unmanned aerial vehicle approved by the operator can obtain the docking and charging service of the charging station, and prevents the unauthenticated unmanned aerial vehicle from occupying the resources of the operat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More