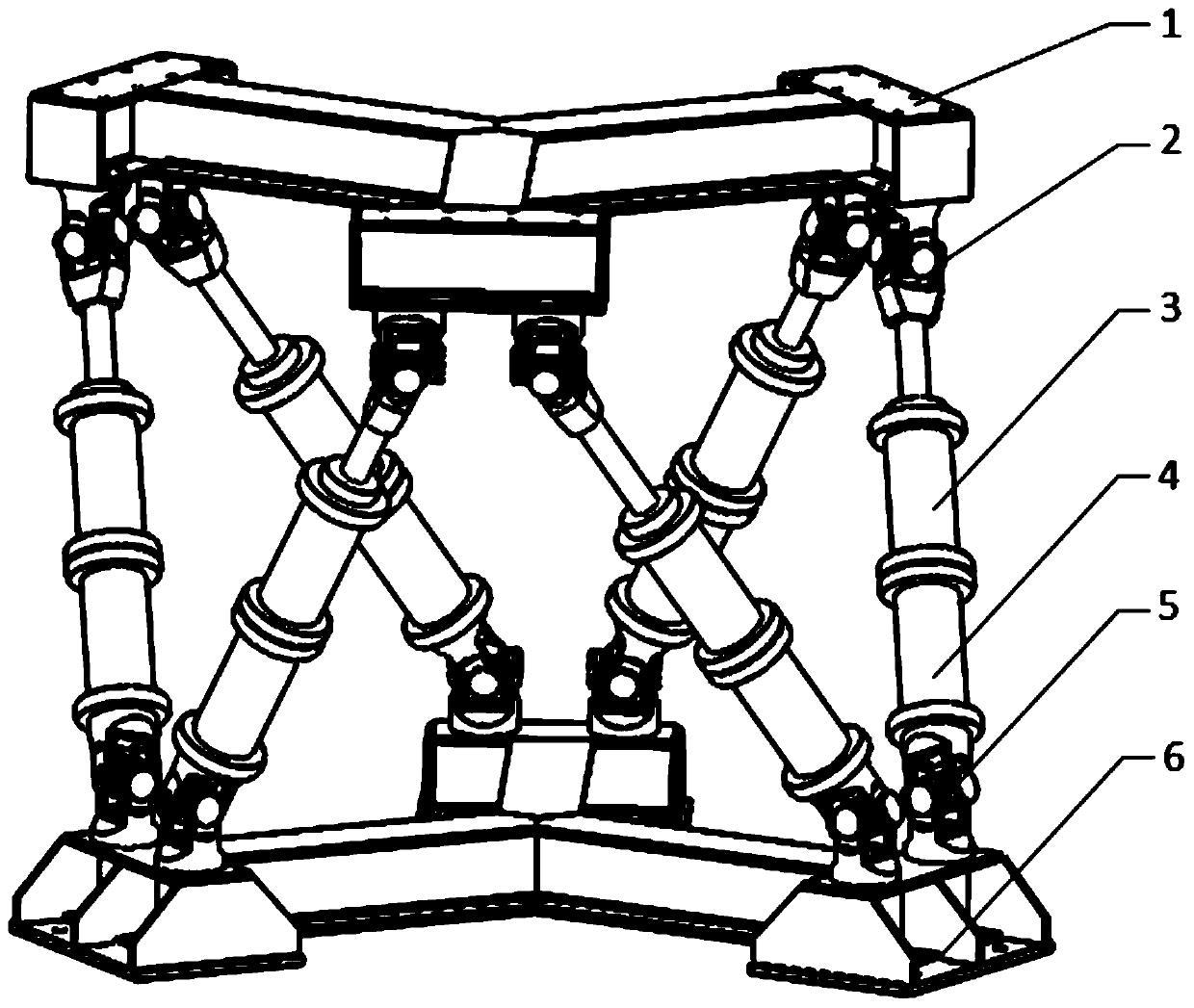
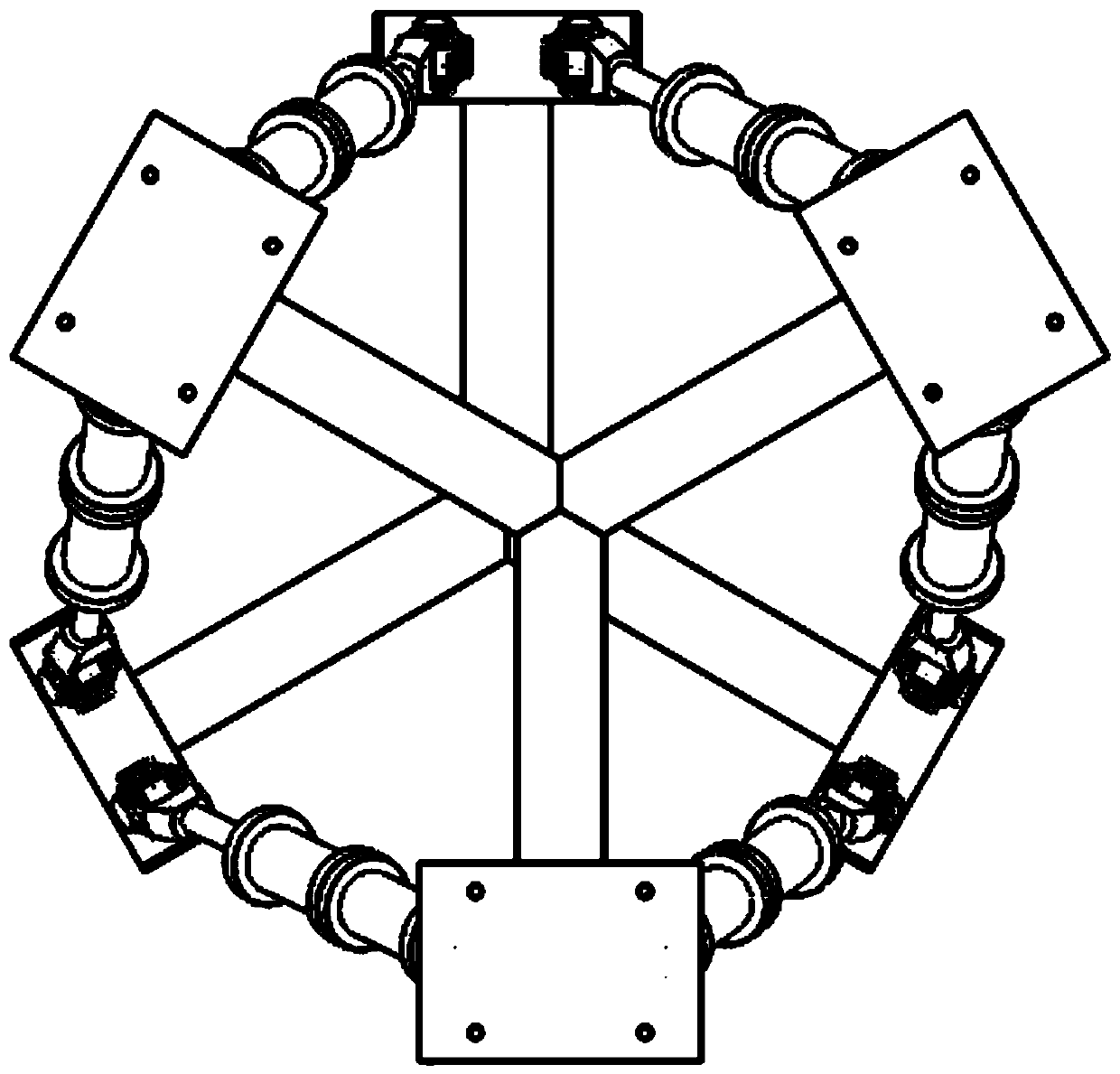
Pneumatic-hydraulic driven six-degree-of-freedom parallel motion platform system for motion simulation
A technology of motion simulation and degree of freedom, which is applied in simulators, simulators of space navigation conditions, educational appliances, etc., can solve the problems of low system frequency response, limited carrying capacity, low carrying capacity and speed, etc., and achieve the key to improving characteristics, high rigidity, flexible motion characteristics and strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0026] The hydraulic cylinder is controlled and adjusted by a one-way throttle valve to achieve a certain system damping. The pneumatic cylinder is closed-loop controlled by the pneumatic valve. The pose of the six-degree-of-freedom platform is calculated through the signals of each displacement sensor. This kind of motion can achieve different motion characteristics by adjusting the damping of the hydraulic cylinder in an open loop.
[0027] The working process of this embodiment:
[0028] According to the motion posture required by the six-degree-of-freedom parallel platform, the position to be reached by each air-hydraulic cylinder is calculated, and the specified posture is achieved through the closed-loop position control of the cylinder. The one-way throttle valve of the hydraulic cylinder adjusts the damping of the system through open-loop control.
Embodiment 2
[0030] The hydraulic cylinder is closed-loop controlled by the high-speed switching valve to achieve a certain system damping. At the same time, the pneumatic cylinder is closed-loop controlled by the pneumatic valve. The pose of the six-degree-of-freedom platform is calculated through the signals of each displacement sensor. This kind of motion can achieve different motion characteristics by adjusting the damping of the hydraulic cylinder online in a closed loop.
[0031] The working process of this embodiment:
[0032] According to the motion posture required by the six-degree-of-freedom parallel platform, the position to be reached by each air-hydraulic cylinder is calculated, and the specified posture is achieved through the closed-loop position control of the cylinder. The hydraulic cylinder adjusts the damping of the system through closed-loop control of the high-speed switching valve.
[0033] The gas-hydraulic driven six-degree-of-freedom parallel motion platform sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More