

Self-adaptation training control method of parallel lower limb rehabilitation robot and rehabilitation robot
A rehabilitation robot and control method technology, applied in muscle training equipment, gymnastics equipment, sports accessories, etc., can solve the lack of evaluation of the muscle activity and contractility of the affected limb, the inability to detect the muscle activity and rehabilitation status of the affected limb in real time, and the Difficulty adapting to the rehabilitation cycle of patients
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
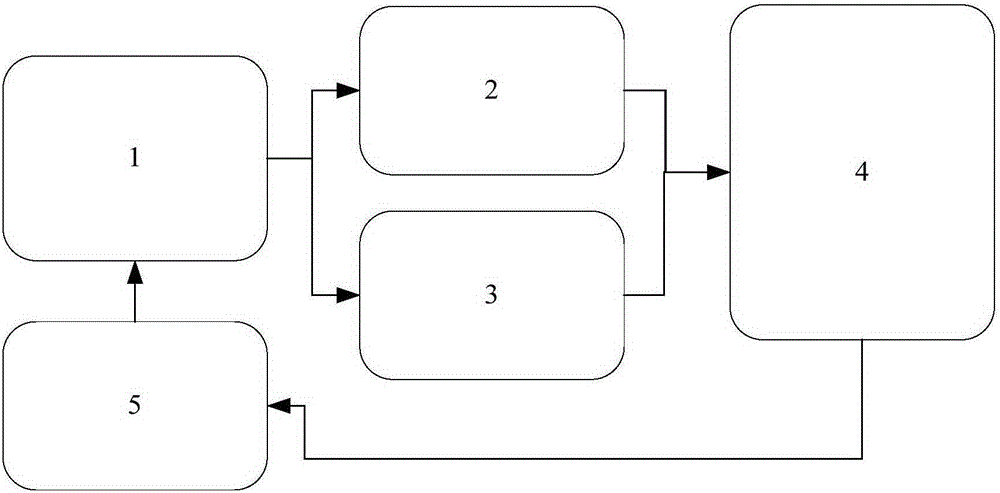
[0060] Such as figure 1 As shown, a parallel lower limb rehabilitation robot involved in the present invention includes: a parallel robot platform 1 , a myoelectric signal acquisition device 2 , a force signal acquisition device 3 , a control interface 4 and a main control box 5 .
[0061]The robot platform 1 includes a movable upper platform, a fixed lower platform and an actuator, and is used to drive the patient's lower limbs to perform rehabilitation exercise training according to control signals. The executive mechanism is composed of six ball screw actuators. The six ball screw actuators are respectively connected to the movable upper platform and the fixed lower platform through the Hooke hinge and the ball hinge. The movable upper platform is equipped with foot covers for fixing the patient's lower limbs. , by controlling the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More