

Multi-rotor-wing unmanned plane
A multi-rotor unmanned aerial vehicle and body technology, applied in the field of unmanned aerial vehicles, can solve the problems of poor horizontal rotation stability, weak anti-interference ability, and poor flight stability, so as to enhance stability, shorten the time for adjusting balance, and ensure flight stability. stable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
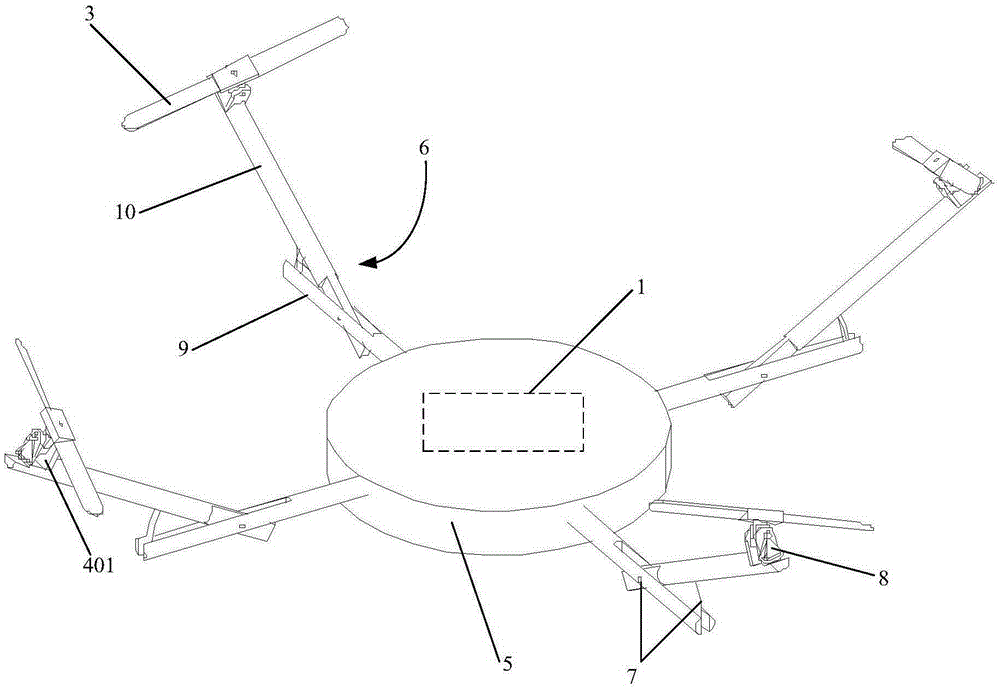
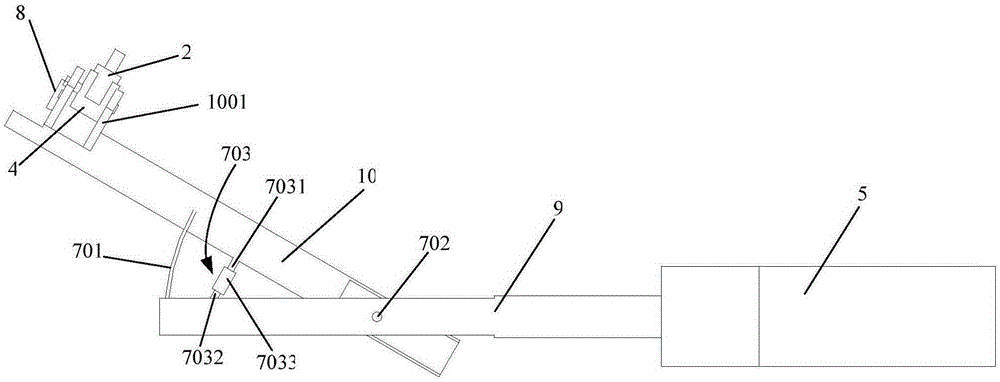
[0044] Such as figure 2 As shown, the first connecting member 7 includes: a reed 701, a pin shaft 702 and a tension member 703. The pin shaft 702 is arranged on the side close to the body 4 to connect with the strut 9 and the swing rod 10 respectively, and the reed 701 is arranged away from One side of the body 5 is respectively connected with the strut 9 and the swing rod 10 , the tension member 703 is arranged between the pin shaft 702 and the reed 701 , and the tension member 703 is respectively connected with the strut 9 and the swing rod 10 .
[0045] The tension member 703 includes an upper screw 7031, a lower screw 7032 and a threaded tube 7033. The upper screw 7031 is connected with the swing rod 10, the lower screw 7032 is connected with the strut 9, and the threaded tube 7033 is connected with the upper screw 7031 and the lower screw 7032 respectively. The upper screw 7031 and the lower screw 7032 are provided with external threads, and the upper and lower ends of t...
Embodiment 2
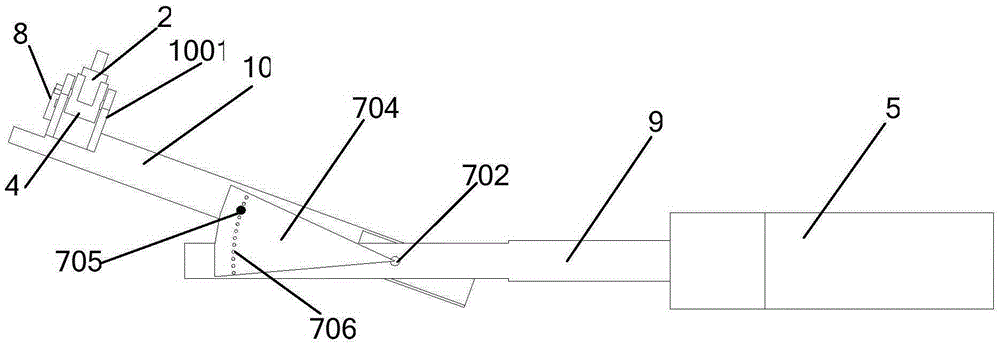
[0049] Such as image 3 As shown, the first connecting member 7 includes: a fan-shaped block 704, a pin shaft 702 and a latch 705. The center of the fan-shaped block 704 is arranged on the side close to the body 5 and is respectively connected to the strut 9 and the swing rod 10 through the pin shaft 702. The fan-shaped The arc end of the block 704 is arranged on the side away from the body 5, and the lower plane of the sector block 704 is connected with the swing rod 10, and a plurality of positioning holes 706 are arranged on the arc inner side of the arc end of the sector block 704, and a screw thread is provided on the latch 705. Correspondingly, a threaded hole is provided at a position corresponding to the positioning hole on the swing rod 10 , and the pin 705 is threadedly connected with the swing rod 10 through the positioning hole 706 .
[0050] The process of adjusting the inclination angle between the propeller 3 and the body 5 using the first connector structure of...
Embodiment 3
[0053] Such as Figure 4 As shown, the first connecting member 7 includes: a pin shaft 702, a push rod 707, a slider 708 and a locking block 709, the pin shaft is arranged on the side close to the body 5 and connected with the strut 9 and the swing bar 10 respectively, and the slider 708 It is arranged on the side far away from the body 5 and connected with the support rod 9. The support rod 9 is provided with external threads, and the locking block 709 is provided with internal threads. Connected, the push rod 707 is connected with the swing rod 10 and the slider 708 respectively.
[0054] The process of adjusting the inclination angle between the propeller 3 and the body 5 using the first connector structure of this embodiment is as follows:
[0055] When the external wind force is strong and the inclination angle between the propeller 3 and the body 5 needs to be increased, the locking block 709 on the inner side of the slide block 708 is rotated inwardly, and then the sli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More