High-accuracy segmented pulse generation method for temperature control
A technology of pulse generation and temperature control, which is applied in the direction of electric pulse generator circuit, etc., can solve the problems of temperature control fluctuations, excessive heating of heating plate temperature, damage, etc., achieve uniform segmental heating, reduce violent fluctuations, and improve control The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
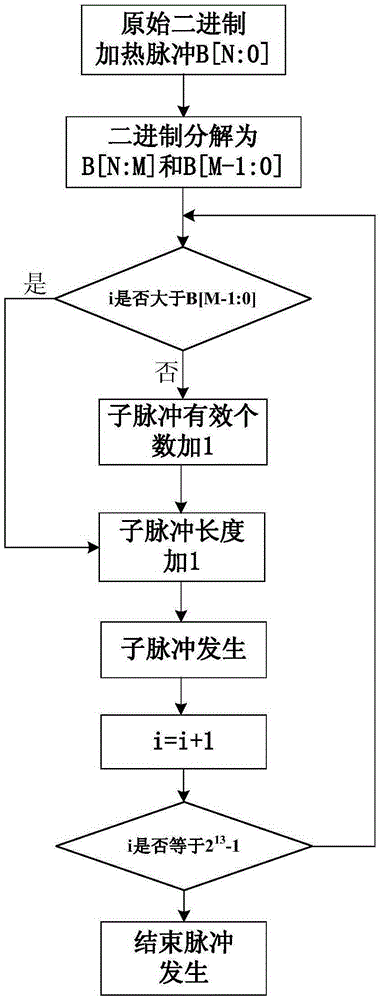
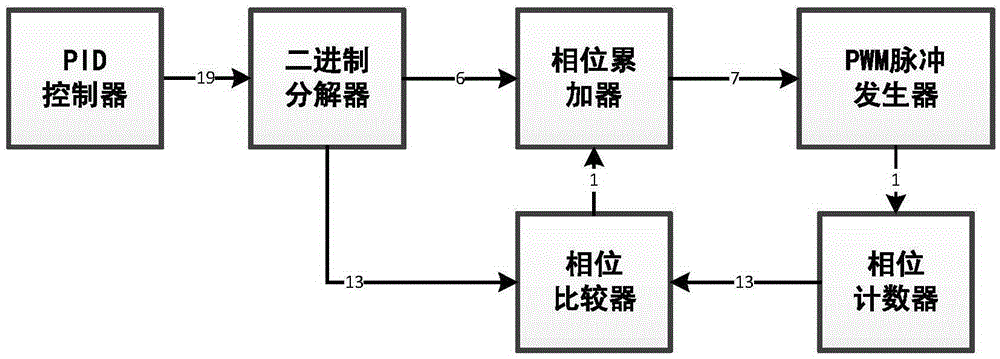
[0026] The present invention proposes a high-precision segmental pulse generation method for temperature control, using segmental heating instead of centralized heating, and forming a closed-loop control through a binary decomposition algorithm to ensure that the accuracy is not lost after segmenting. The following will be described in detail with reference to the accompanying drawings . Such as figure 1 , figure 2 Shown, working process of the present invention comprises:
[0027] Step (1), the PID controller outputs an original binary number pulse whose number of effective heating pulses is B[N-1:0] and enters the binary resolver, wherein the total length of the original binary number pulse is 2 N -1, the effective heating pulse in the binary number pulse is logic 1, and the remaining pulses are logic 0; the effective heating pulse is used to realize temperature control;
[0028] Step (2), the binary decomposer will decompose the effective heating pulse in the original b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



