

Intelligent recognition medlar picking device
A kind of wolfberry and intelligent technology, which is applied in the direction of picking machines, agricultural machinery and implements, etc., can solve the problems of huge lifting device, only lifting, limited automation of wolfberry picking, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
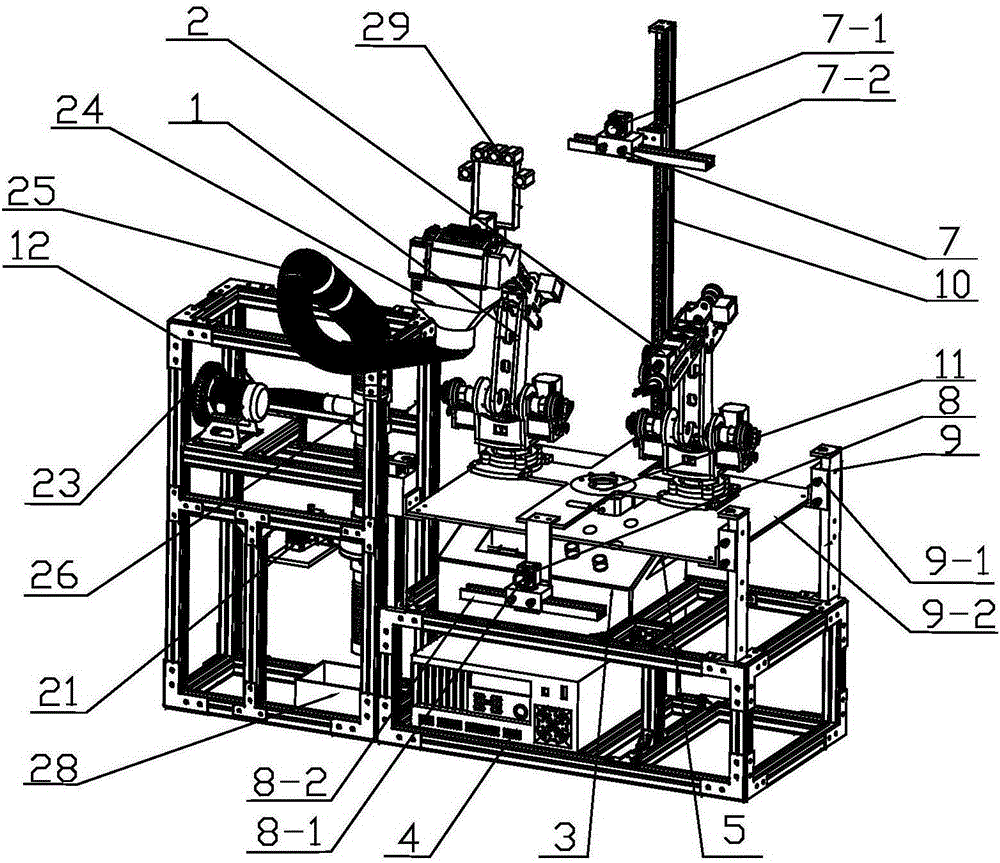
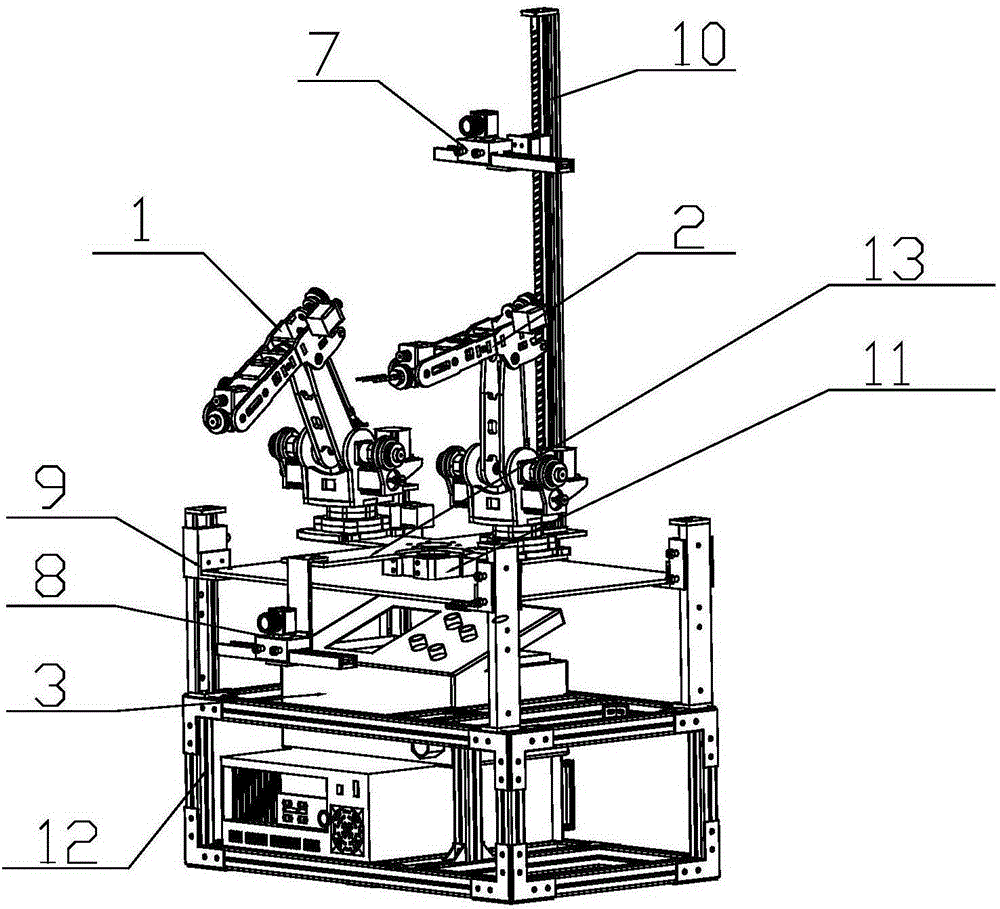
[0095] The intelligent identification wolfberry picking device includes a frame and a power supply system 5 , a control system 4 , a drive system 6 , a machine vision system, a wolfberry picking robot 1 , a branch positioning robot 2 , a wolfberry picking head and a fruit collection device arranged on the frame. The control system 4 is respectively connected with the machine vision system, wolfberry picking manipulator 1, branch positioning manipulator 2, wolfberry picking head and fruit collecting device through the drive system 6. The power supply system 5 , control system 4 and drive system 6 are all arranged in the control cabinet 3 . The power system 5 includes a lithium iron phosphate battery 5-1, an inverter 5-2 and a voltage stabilizing module 5-3; the control system 4 is an industrial computer; the control cabinet 3 also includes a touch screen 3-1 and Information Fusion Module 3-2. Among them, the lithium iron phosphate battery 5-1 is connected to the inverter 5-2 a...
Embodiment 2
[0100] Different from Embodiment 1, the electric turntable 11 includes a turntable 11-1, a disk body 11-2, a bearing 11-3, a shaft coupling 11-4 and a servo motor 11-5. The disc body 11-2 and the servo motor 11-5 are arranged on the square table top 9-2, the rotary table 11-1 is connected with the disc body 11-2 through the bearing 11-3, and the servo motor 11-5 is connected through the The shaft coupling 11-4 is connected with the disc body 11-2.
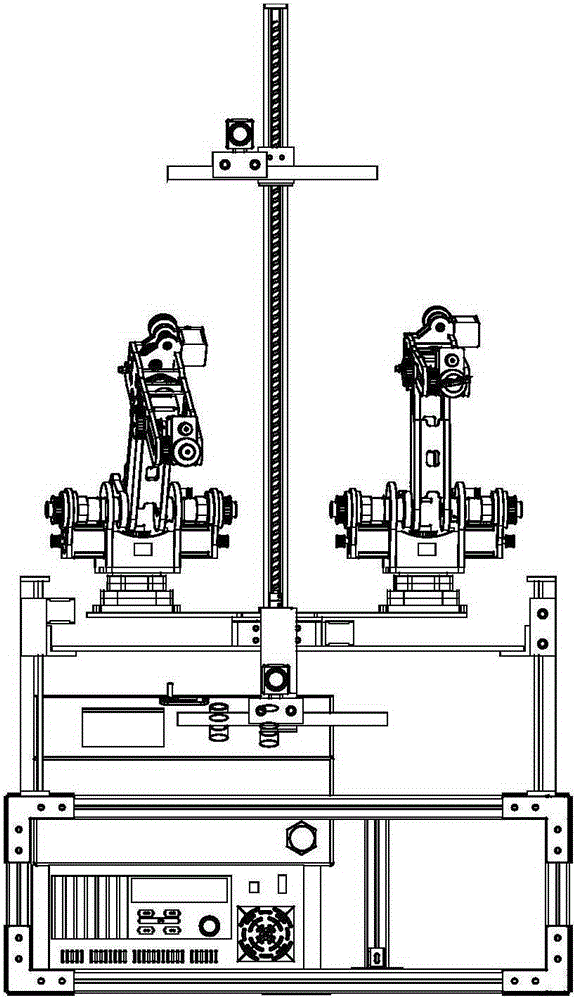
[0101] The wolfberry picking device also includes a positioning rod 13, and the positioning rod 13 includes a front positioning rod 13-1 and a rear positioning rod 13-2. The visual lifting system 7 is fixed on the end of the rear positioning rod 13-2, and the head end of the rear positioning rod 13-2 is fixed on the edge of the turntable 11-1. The low position vision system 8 is fixed on the end of the front positioning rod 13-1, and the head end of the front positioning rod 13-1 is fixed on the edge of the turn table 11-1. The l...
Embodiment 3
[0103] The difference from Embodiment 2 is that the high-position vision system 7 includes a camera I7-1 and a pulley two-axis smooth bar slide I7-2. The pulley biaxial light bar slide table I7-2 includes a slide table body I7-2a, a biaxial light bar I7-2b, a pulley bearing I7-2c and a slide table slider I7-2d. The base of the camera I7-1 is connected to the sliding table slider I7-2d and the pulley biaxial light bar sliding table I7-2, and the sliding table body I7-2a is connected to the visual lifting system 10 through the L-shaped corner code I10-4 The slider II10-3 is connected; the two sides of the slider body I7-2a are provided with a double-axis light bar I7-2b, and the pulley bearing I7-2c is fixed on the slider I7-2d of the slider through an internal bearing, and the slider The slider I7-2d is installed on the slide body I7-2a.
[0104] The low-level vision system 8 includes a camera II8-1 and a pulley biaxial light bar slide II8-2; the pulley biaxial light bar slide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More