

A Method for Determining the Proportion of Influence of Space Manipulator Parameters on Motion Reliability
A technology of space manipulator and determination method, which is applied in the fields of electrical digital data processing, special data processing applications, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] 1. The set of factors affecting the reliability of space manipulator movement and the set of task parameters
[0074] Table 1 Space manipulator DH parameters
[0075]
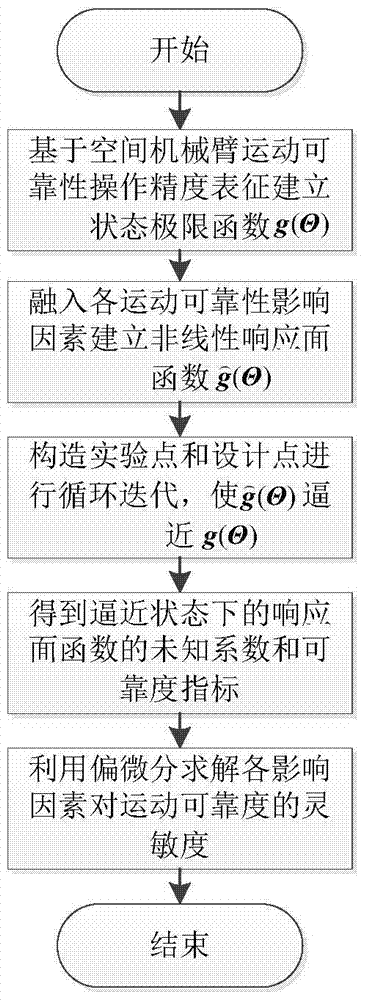
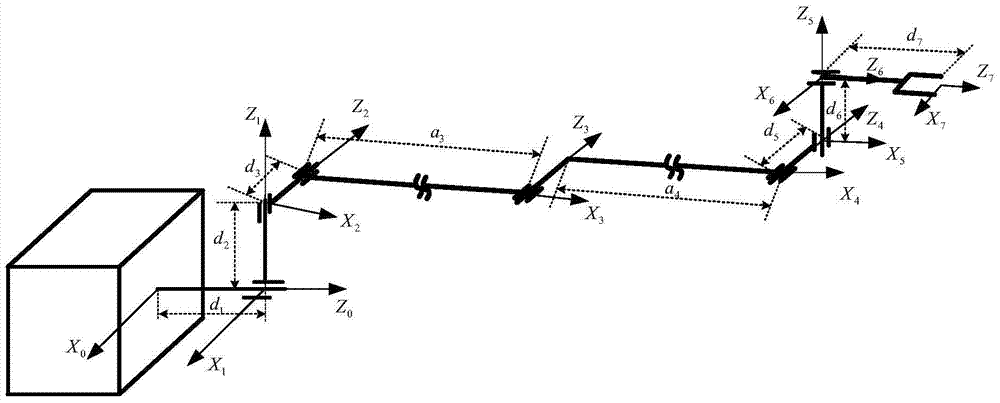
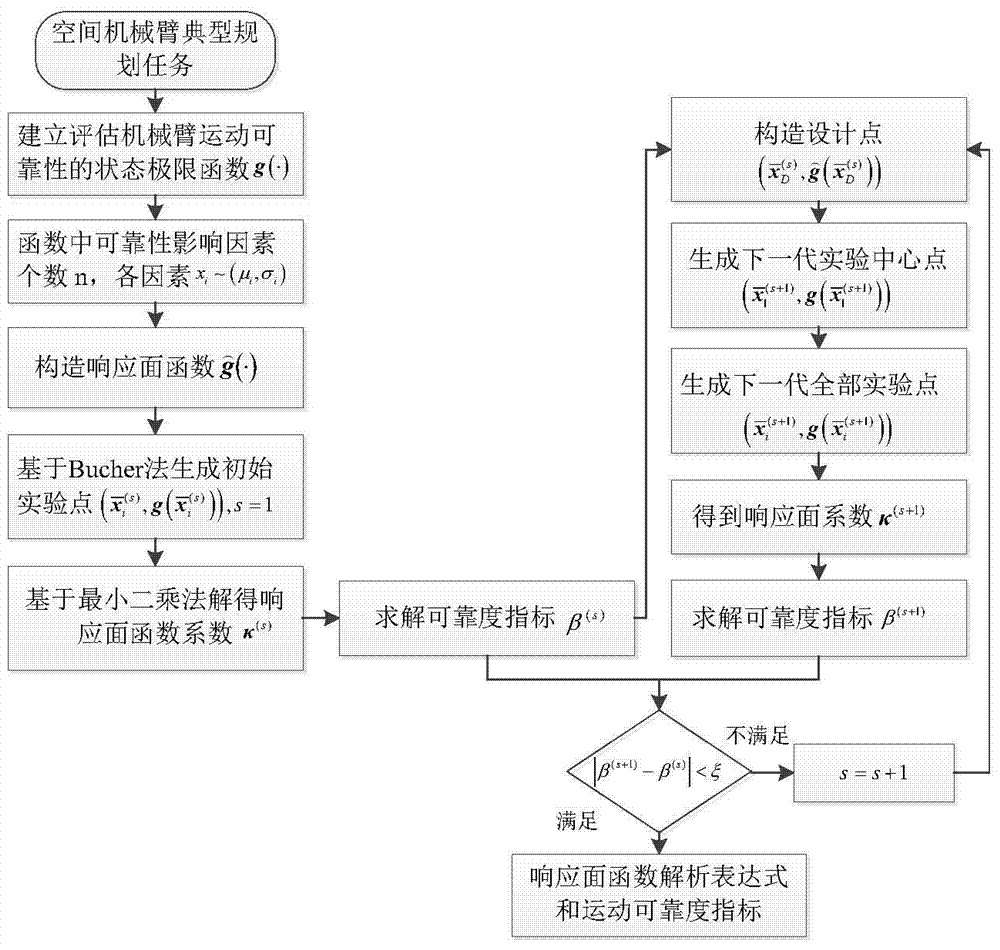
[0076] Such as figure 1 Shown is the flow chart of the method of the present invention. In the present invention, the robot arm with seven degrees of freedom in space is taken as the research object, and the configuration of the robot arm is as follows: figure 2 As shown, the DH parameters are shown in Table 1. Since there are many factors affecting the motion reliability of the space manipulator, according to the influence mechanism and mode of action of each factor on the motion reliability, it can be divided into assembly factors, transmission factors, friction factors, lubrication factors and the inherent parameters and control of space manipulators. variables etc. Here, the kinematic parameter deviation of the space manipulator is selected as the geometric parameter deviation Δα, Δa, Δd∈R n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More