

A high temperature pickup manipulator
A manipulator and high-temperature technology, applied in the field of robots, can solve the problems of inability to use molded products such as three-claw cylinders, unsatisfactory moving speed of the manipulator, and easy burns of manipulator parts, etc., to reduce the time spent in the air, simple structure, and practical wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The following describes the present invention in detail, and the features and advantages of the present invention will become more clear and definite along with these descriptions.
[0079] The word "exemplary" is used exclusively herein to mean "serving as an example, embodiment, or illustration." Any embodiment described herein as "exemplary" is not necessarily to be construed as superior or better than other embodiments. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
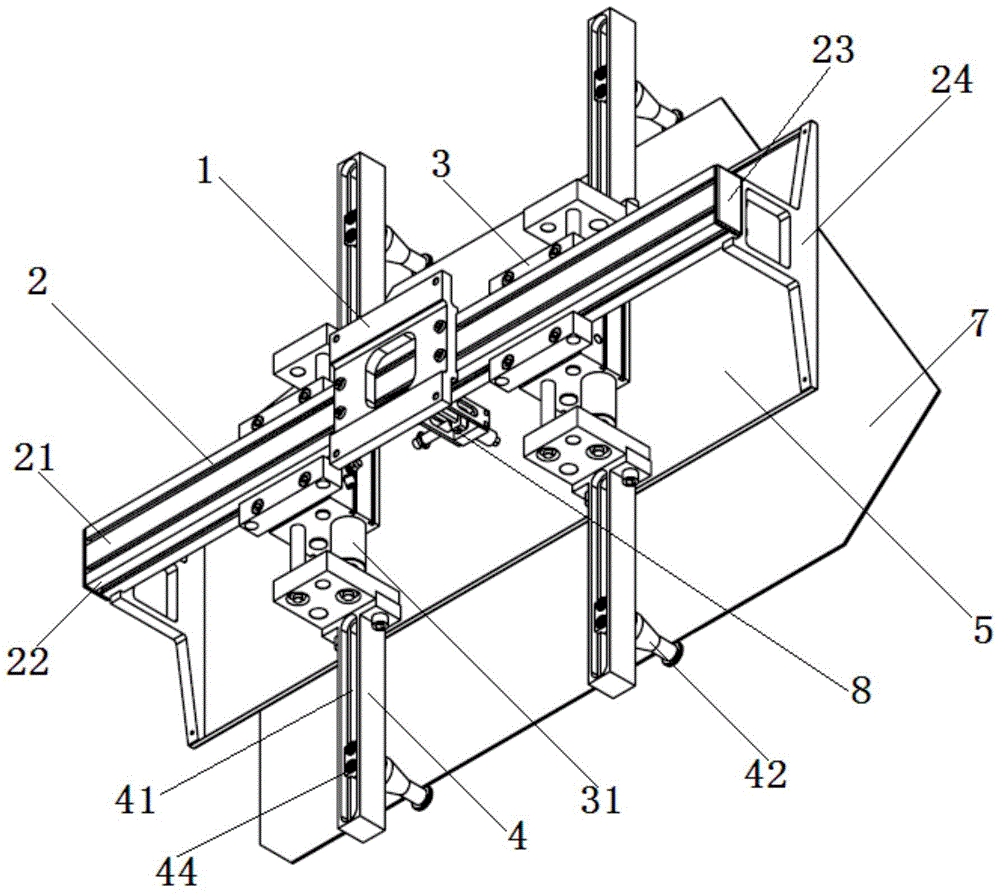
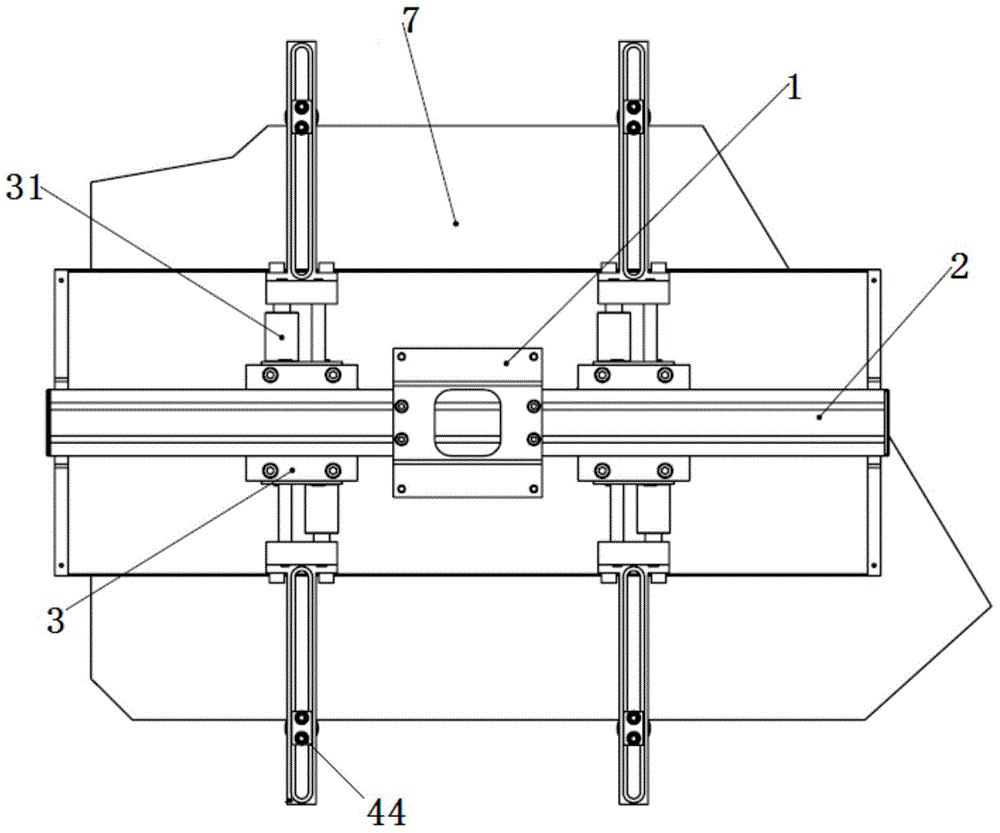
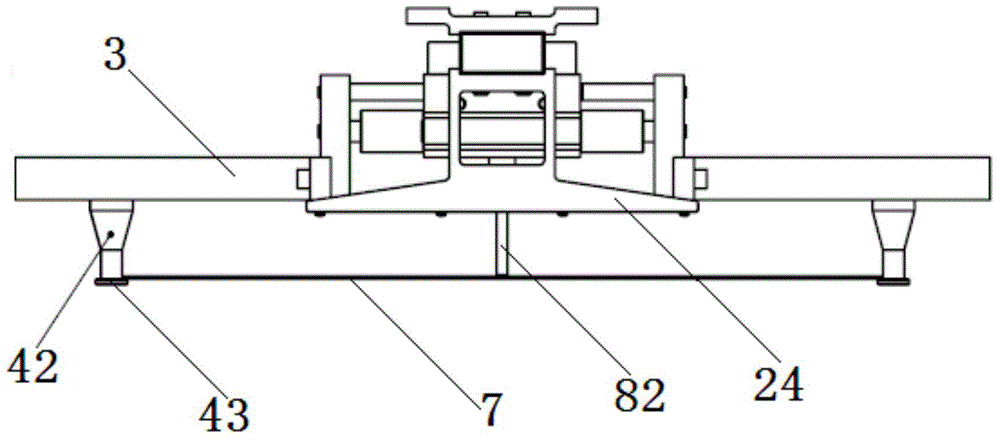
[0080] In a preferred embodiment, as figure 1 , figure 2 , image 3 , Figure 4 As shown in , the high-temperature pick-up manipulator includes a mounting plate 1 , a frame 2 , a clamping cylinder 3 , a finger adjustment seat 4 , fingers 42 , a baffle plate 5 and a sensor mechanism 8 .
[0081] In a preferred embodiment, as figure 1 , Figure 5 As shown in , the mounting plate is in the form of a pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More