Control device and control method of tall tree pruning mechanical arm
A robotic arm, pruning technology, applied in computer control, program control, general control system and other directions, can solve the problems of low degree of automation, poor safety, high labor intensity, etc., to achieve high degree of automation, high work efficiency, labor saving Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
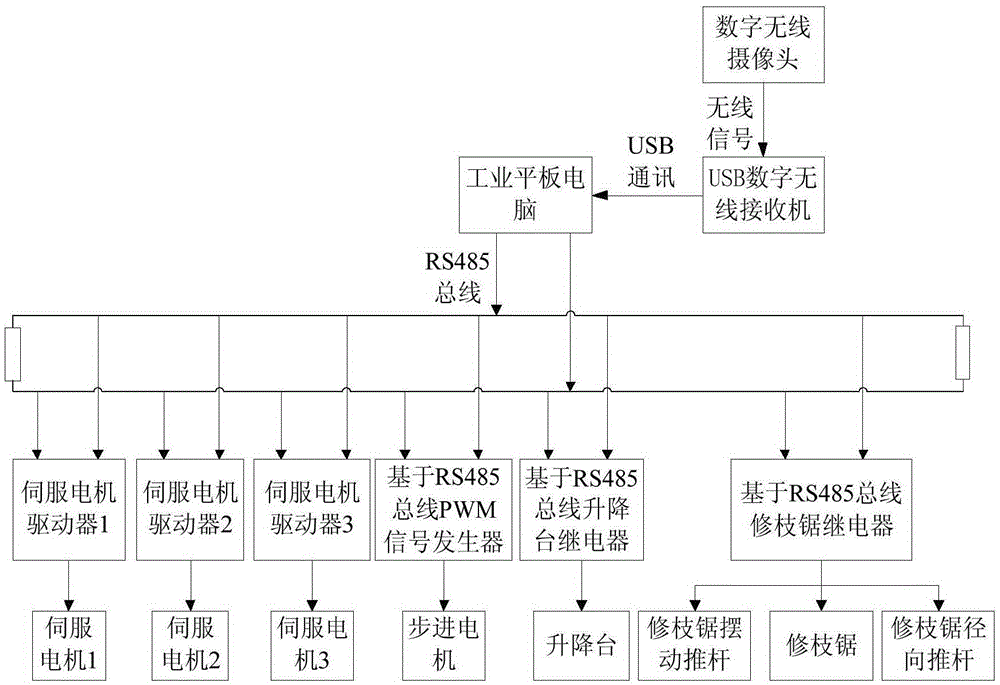
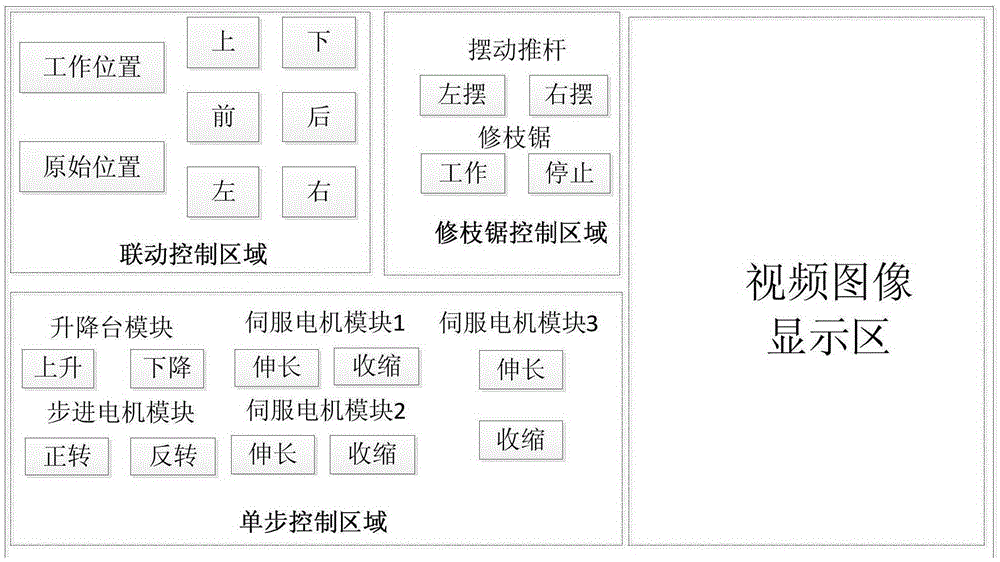
[0030] Below in conjunction with accompanying drawing, the patent of the present invention is further described. A kind of tall tree pruning mechanical arm control device and control method described in the present invention, such as figure 1 , 2shown. A tall tree pruning mechanical arm control device includes a video image acquisition unit and a control unit. The video image acquisition unit includes a digital wireless camera and a USB digital wireless receiver. The digital wireless camera is fixed on the front end of the pruning saw for shooting, and the video images are transmitted to the USB digital wireless receiver through wireless signals. The USB digital wireless receiver is installed on the industrial tablet computer through the USB interface, receives the video images taken by the digital wireless camera, and displays the video images on the industrial tablet computer. The control unit includes a touch-screen industrial tablet computer module, a lifting platform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com