

A wire rope drive universal mechanism for surgical drills
A universal mechanism and surgical technology, applied in ear treatment and other directions, can solve the problems of large overall size, poor accuracy, complex transmission structure, etc., to achieve smooth motion, reduce accumulated errors, and flexible operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with specific embodiments.
[0025] The invention relates to a wire rope transmission universal mechanism for a surgical drill, which is used to solve the multi-degree-of-freedom problem of the end actuator of a surgical drill robot in a narrow space.
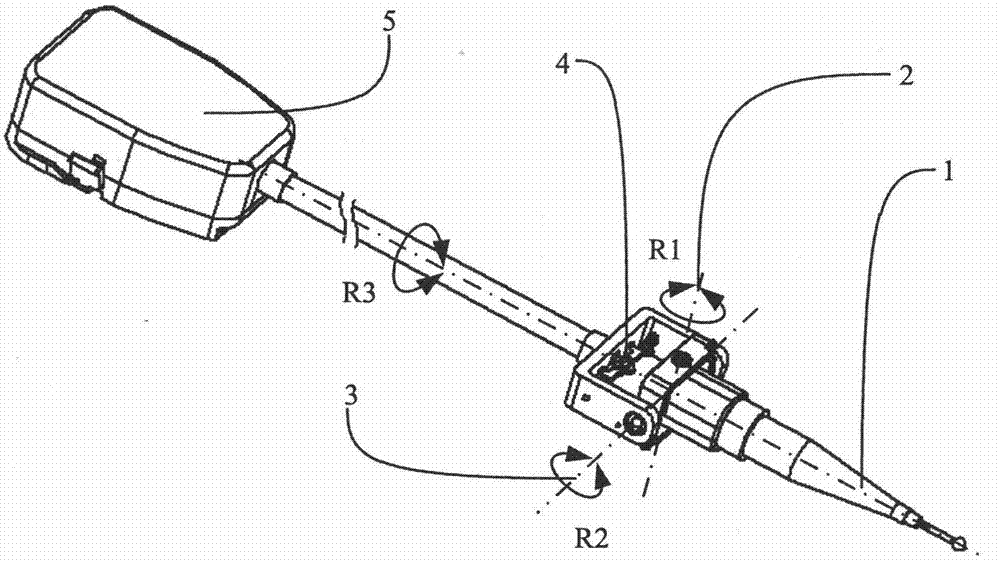
[0026] Such as figure 1 Shown is a schematic diagram of the overall structure of the universal mechanism of the present invention applied to a surgical drill. The universal mechanism includes a deflection mechanism 2, a pitch mechanism 3 and a wire rope transmission system 4, the front end of which is connected to the surgical drill 1, and the rear end is connected to the quick-change interface Mechanisms 5 are connected and can realize rotations R1, R2, R3 in three degrees of freedom.
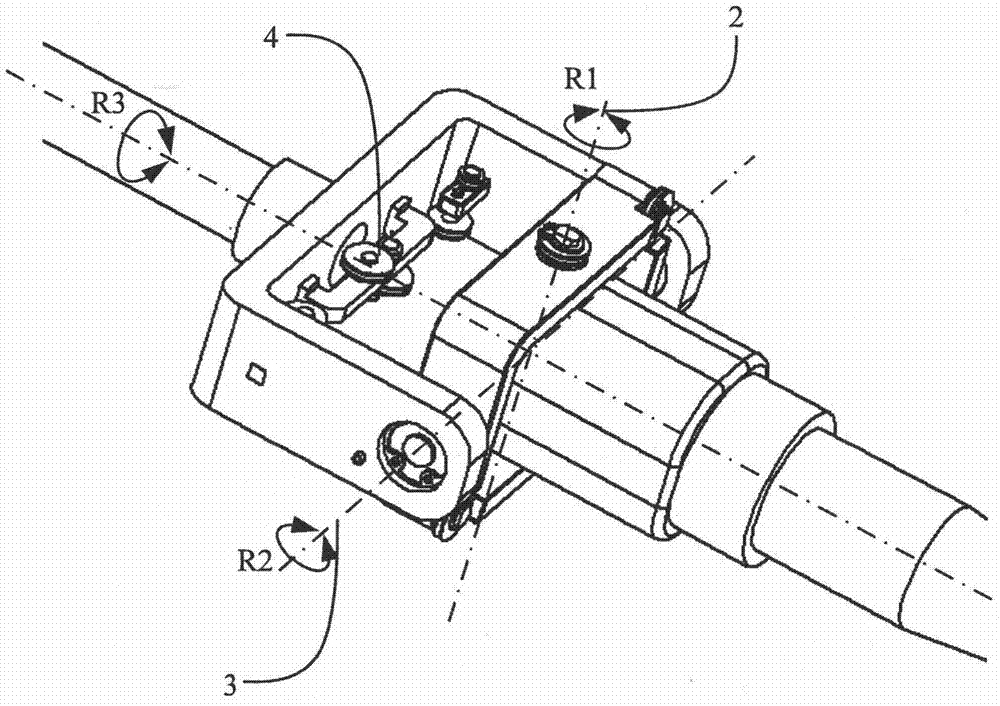
[0027] Such as figure 2 It is a schematic diagram of the structure of the universal mechanism of the present invention. The deflection structure 2 and the pitch st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More