Gyro-free strapdown system based on DSP/FPGA
A technology without gyro and strapdown, applied in the field of navigation system, can solve the problems of insufficient calculation speed and precision, and achieve the effects of improving calculation speed and accuracy, reducing cost, reducing volume and weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
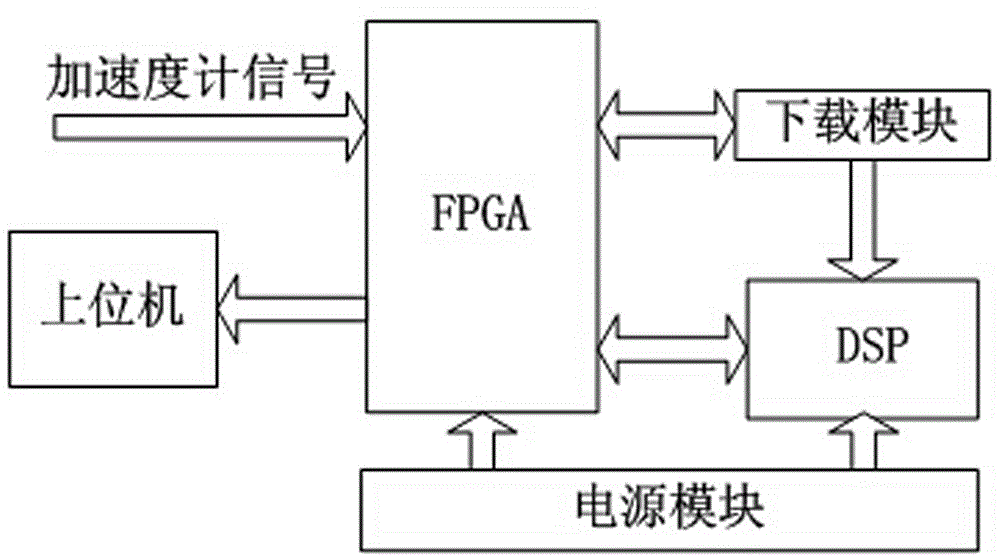
[0015] combine figure 1 , figure 1 It is the overall block diagram of the system. A gyro-less strapdown system based on DSP / FPGA is mainly composed of a host computer, an FPGA processing module, a DSP processing module, a download module, and a power supply module. The design of the present invention adopts FPGA to complete the collection of MEMS acceleration signals, and DSP completes correlation filtering and navigation solution. The model of 6 MEMS accelerometers that the present invention adopts is identical, is ADXL362 of ADI. In the present invention, DSP is mainly used for navigation calculation, and DSP is required to have strong computing ability, and high-performance floating-point microcontroller TMS320C28346 is selected. The main purpose of FPGA among the present invention is to bond the communication between DSP and MEMS and the upper computer, including the SPI communication between ADXL362, the UART communication between the upper computer and the commun...
Embodiment 2
[0017] combine figure 2 , figure 2 Flowchart for solving the attitude of the vehicle. The calculation of the attitude angle of the carrier is realized by solving the differential equation of the quaternion. The angular velocity obtained from the solution is transformed into the geographic coordinate system, and the quaternion is obtained by using the fourth-order Runge-Kutta method, and then the carrier is obtained. Attitude array, and finally calculate the attitude of the carrier. The specific steps are: (1) given the initial value of the system; (2) obtained the data information of the MEMS accelerometer according to the experiment, and obtained the angular velocity of the carrier by calculating the specific force information of the accelerometer, and after compensating the error of the accelerometer, Transform the calculated three-axis angular velocity into the geographic coordinate system; (3) use the quaternion method to solve the differential equation of the quate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More