Method for automatically searching and rescuing person in distress on sea through employing unmanned plane
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A drone and personnel technology, applied in the field of drone search and rescue, can solve problems such as missed judgments
Inactive Publication Date: 2016-04-20
SHANGHAI MARITIME UNIVERSITY
View PDF5 Cites 19 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] The technical problem to be solved by this invention is to overcome the shortcomings of traditional search and rescue methods that use a large number of manual detection, which is easy to miss judgment due to the fatigue of observers, and proposes a method for automatically detecting people in the water using drones
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0095] This embodiment implements a whole process of parameter initialization of a method for automatically searching and rescuing people in distress at sea using a drone.
[0096]1. In the initialization process of the image denoising module, its input is a collection of color images containing persons in distress, lifeboats and sea surfaces, and a collection of video clips containing waving motions and sea video clips that do not contain waving motions. The video clips can be See as a collection of video frames. For the input image X, first set a 3×3-dimensional window, consider each pixel point X(i, j) of the image X, and the pixel values corresponding to the 3×3-dimensional matrix with this point as the center point are respectively is [X(i-1, j-1), X(i-1, j), X(i-1, j+1), X(i, j-1), X(i, j), X (i, j+1), X(i+1, j+1), X(i+1, j), X(j+1, j+1)] are arranged from large to small, whichever is the The value in the middle is the filtered value corresponding to the new pixel X′...
Embodiment 2
[0147] This embodiment realizes the whole detection process of a method for automatic search and rescue of persons in distress at sea by using an unmanned aerial vehicle.
[0148] 1. During the detection process of the image denoising module, its input is the color image taken by the camera of the drone. For the input image X, first set a 3×3-dimensional window, consider each pixel point X(i, j) of the image X, and the pixel values corresponding to the 3×3-dimensional matrix with this point as the center point are respectively is [X(i-1, j-1), X(i-1, j), X(i-1, j+1), X(i, j-1), X(i, j), X (i, j+1), X(i+1, j+1), X(i+1, j), X(j+1, j+1)] are arranged from large to small, whichever is the The value in the middle is the filtered value corresponding to the new pixel X′(i, j). Note that for the boundary point of X, some pixels corresponding to its 3×3-dimensional window do not exist, so only It is necessary to calculate the median value of the pixel points that fall within the wi...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
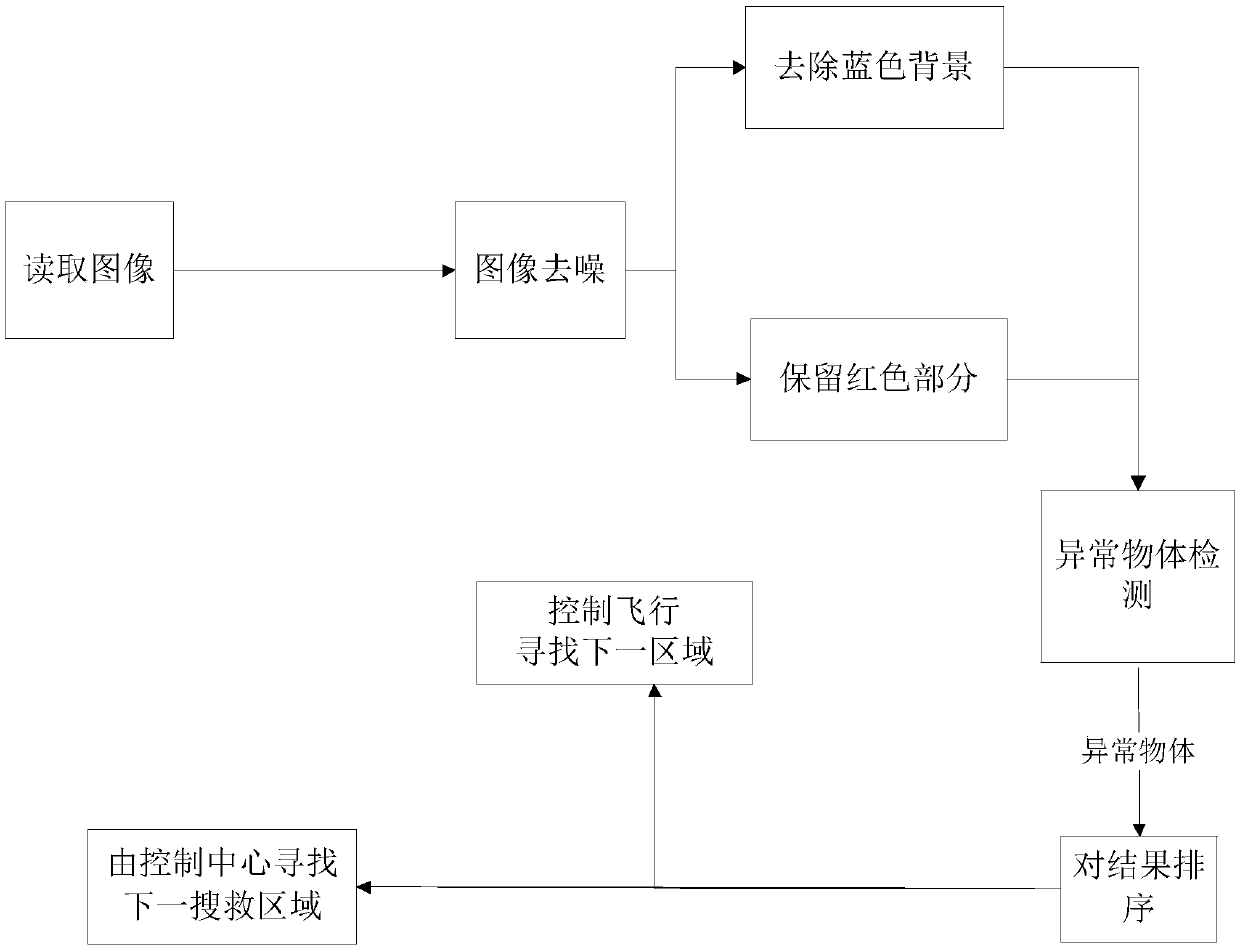
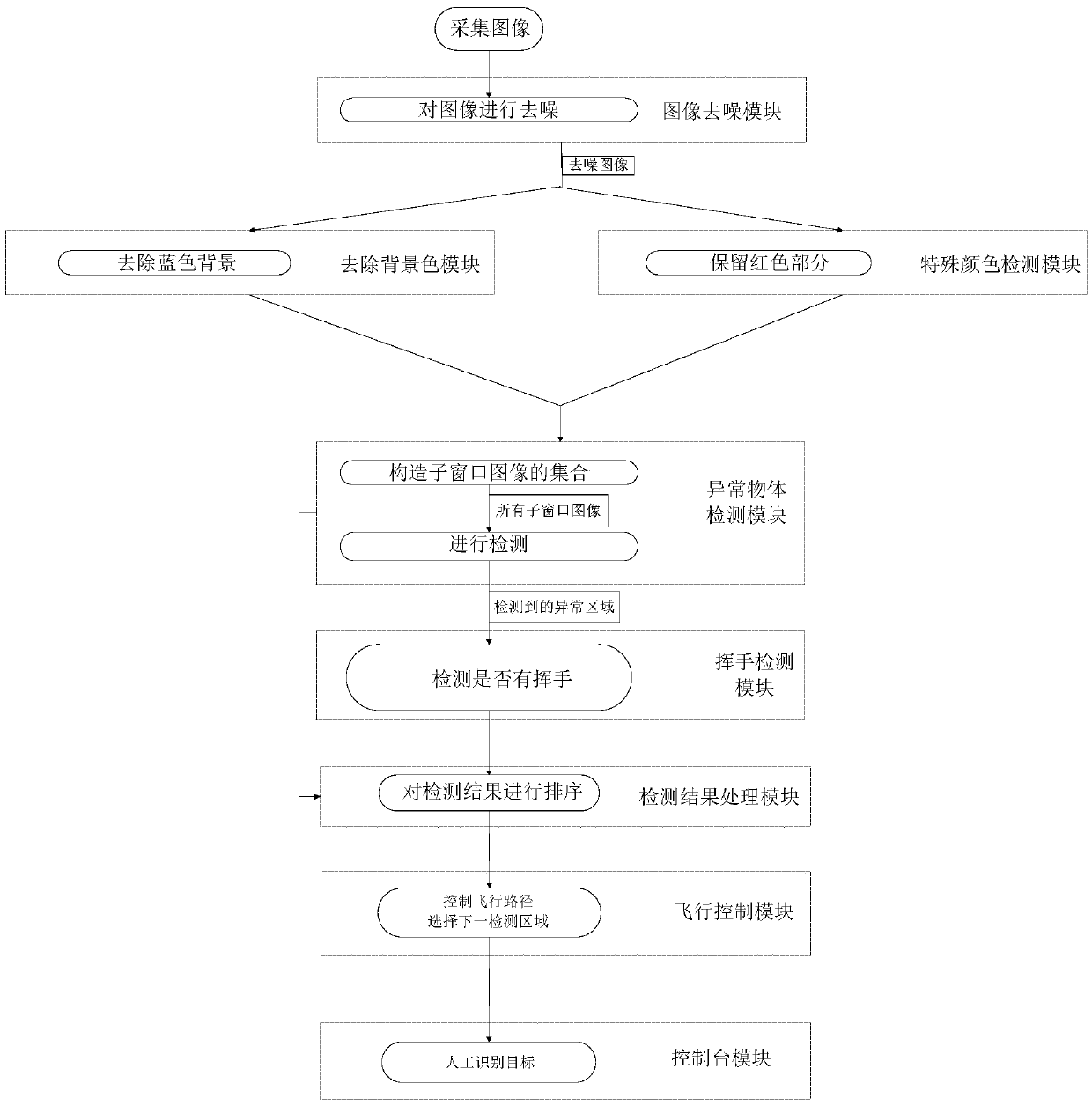
The invention discloses a method for automatically searching and rescuing a person in distress on the sea through employing an unmanned plane, and the method employs the following modules: an image noise removing module, a background color removing module, a special color detection module, an abnormal object detection module, a hand-shaking detection module, a detection result processing module, a flying control module, and a console module. The image noise removing module is used for removing the noises of a collected image. The background color removing module is used for removing the background color on the sea. The special color detection module is used for extracting an image close to red color and yellow color. The abnormal object detection module is used for carrying out the abnormal object detection of the extracted image. The hand-shaking detection module is used for the hand-shaking detection of an abnormal object. The detection result processing module is used for sorting the detection results. The flying control module is used for controlling the flying path of the unmanned plane. The console is used by a monitoring worker for carrying out the final screening of the detection results.
Description
technical field [0001] The invention relates to the field of unmanned aerial vehicle search and rescue, and the field of computer vision, in particular to a method for searching and rescuing people in the water using an unmanned aerial vehicle. Background technique [0002] For the search and rescue work of ships in distress on the sea, the traditional method uses aircraft or ships to search and rescue the accidental sea area, and uses manual observation of suspicious areas. This method has a high demand for manpower, and will cause missed judgments due to the fatigue of observers. ; If drones are used to collect images of the falling water area, and manual observation is performed on the remote console, the wireless bandwidth requirements will be high, high-definition images cannot be transmitted in real time, multiple drones will cause interference, and there is no computer-aided control The station still causes observer fatigue and misjudgment. [0003] The present inven...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More