

Method and system for regularized three-dimensional modeling of rods based on density peak clustering
A technology of density peak and three-dimensional modeling, which is applied in the field of density peak clustering to extract poles and model them in 3dsMax, which can solve the problem of difficulty in satisfying the reality, inability to distinguish different types of utility poles, street trees, and single model And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention uses the spatial distribution characteristics of pole-shaped point clouds to extract urban pole-shaped features such as trees, and proposes to use the regularized distribution characteristics of pole-shaped objects to extract urban ground features that have obvious pole-shaped characteristics but are difficult to identify due to nearby interference. The rods are added to the extraction process and eventually integrated into the digital city. The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
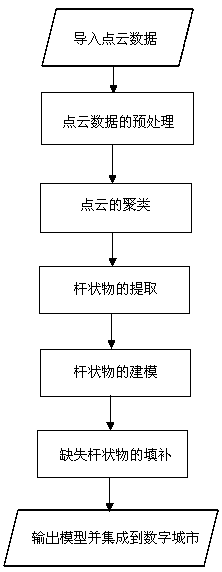
[0036] see figure 1 The specific implementation process of the regularized three-dimensional modeling method for rod-shaped objects based on density peak clustering provided by the embodiment of the present invention is as follows:
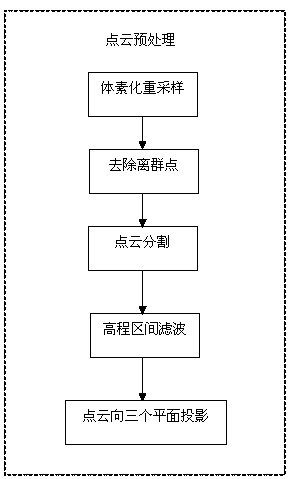
[0037] Step 1: Preprocessing of point cloud data.
[0038] Starting from the original vehicle-mounted point cloud data and clustering...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More