

Robot-assisting motor stator carrying system
A robot-assisted, motor-stator technology, used in manipulators, program-controlled manipulators, metal processing, etc., can solve the problems of low assembly quality, low production efficiency, and high prices.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
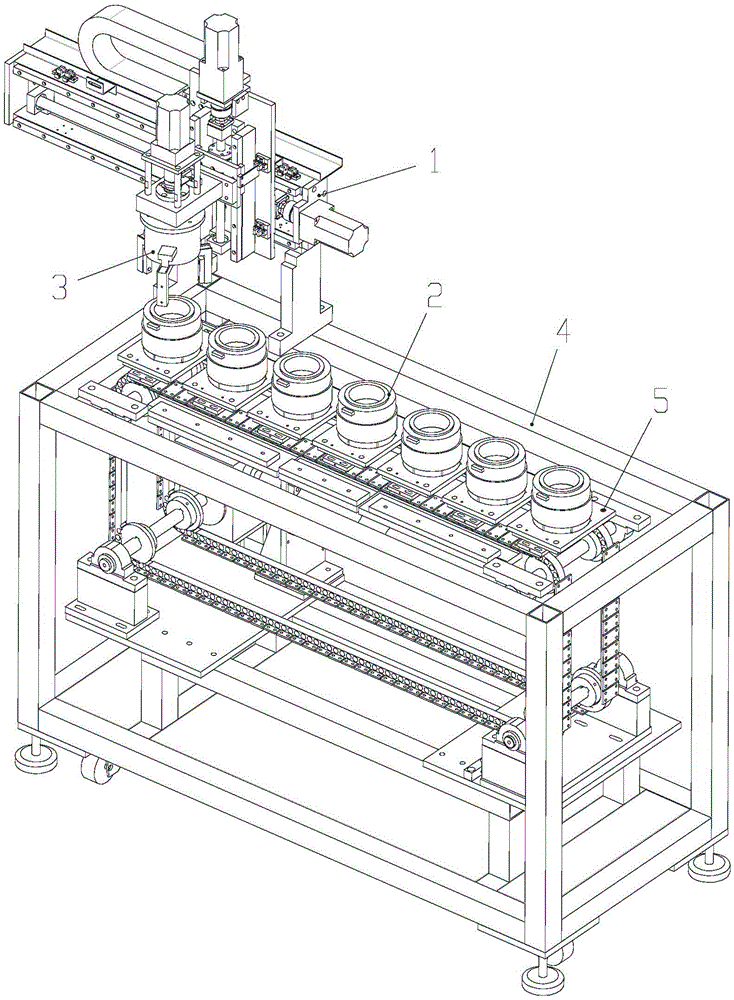
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings, but does not constitute any limitation to the present invention. Similar component numbers in the accompanying drawings represent similar components. As mentioned above, the present invention provides a robot-assisted motor stator handling system, which is used to realize the grasping and transfer of the stator, combined with the conveyor belt, to realize the automatic transfer and assembly of the stator.
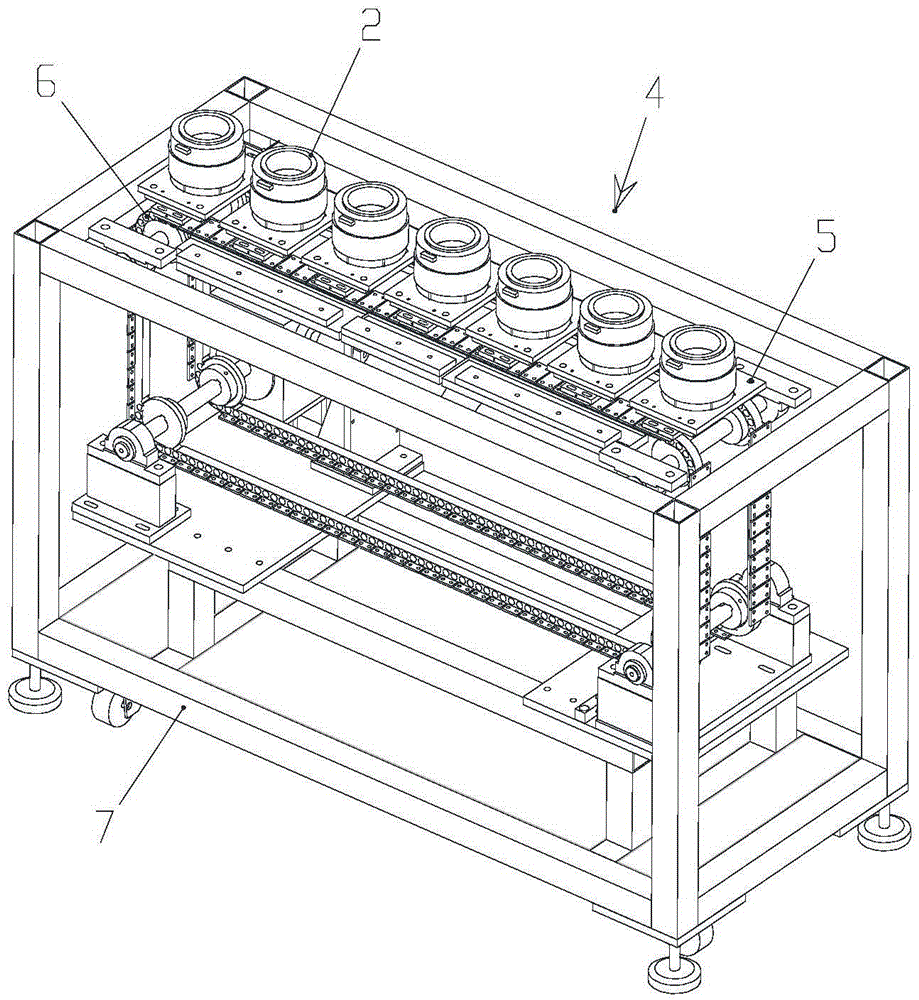
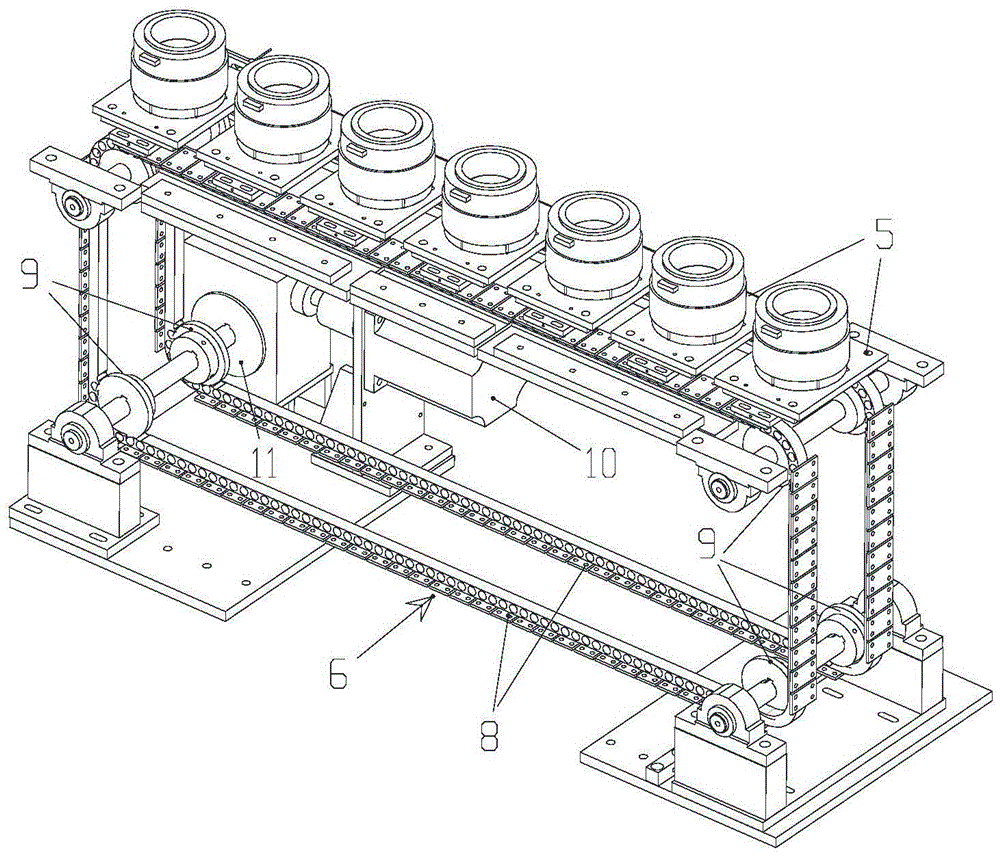
[0029] figure 1 It is a structural schematic diagram of the robot-assisted motor stator handling system of the present invention, figure 2 , 3 It is a structural schematic diagram of the transmission mechanism of the robot-assisted motor stator handling system of the present invention, Figure 4 , 5 It is a structural schematic diagram of the robot of the robot-assisted motor stator handling system of the present invention, Image 6 is the schematic dia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More