

PC-control-supporting multi-rotor-wing unmanned-aerial-vehicle control system
A multi-rotor unmanned and control system technology, applied in the field of aircraft communication control, can solve the problems of few safety protection functions, limited coverage of wireless remote control signals, and low scalability of controlling aircraft, so as to improve the incomplete information collection and display , Make up for the effect of limited flight radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0042] This embodiment discloses a multi-rotor unmanned aerial vehicle control system that supports PC control, which not only greatly reduces the difficulty of operation, improves operational safety, and expands the flight control range, but also supports real-world control of multi-rotor aircraft through video transmission. . In addition, multicopter enhancements can be further enhanced by developing expansive plug-ins on the PC.
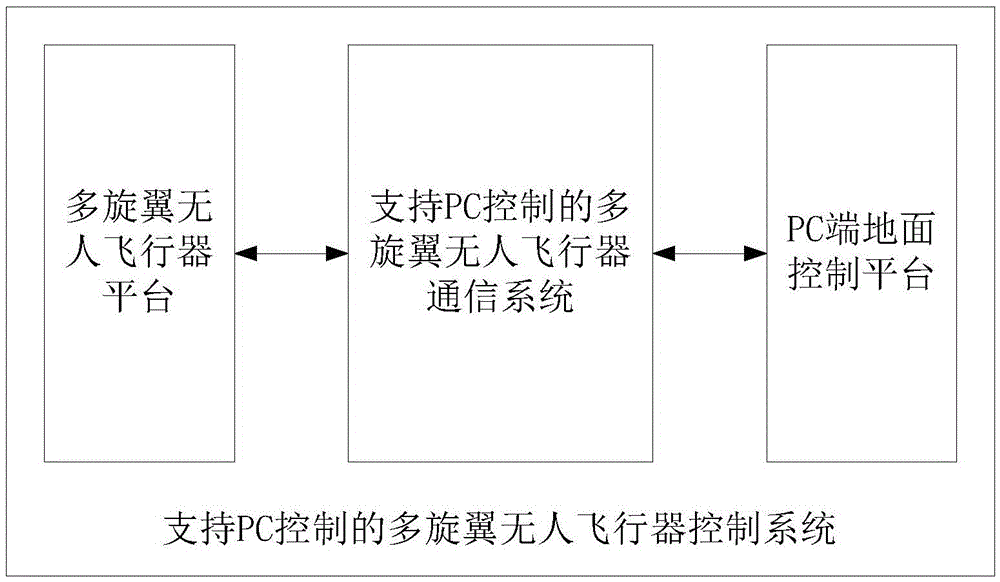
[0043] The basic structure of the control system is as follows figure 1 shown. It mainly includes the multi-rotor UAV platform, the PC-side ground control platform, and the communication system between the PC-side and the multi-rotor UAV. The combination of these three forms a multi-rotor UAV system that supports PC control.
[0044] Specifically, the content of the present invention includes the following three components:
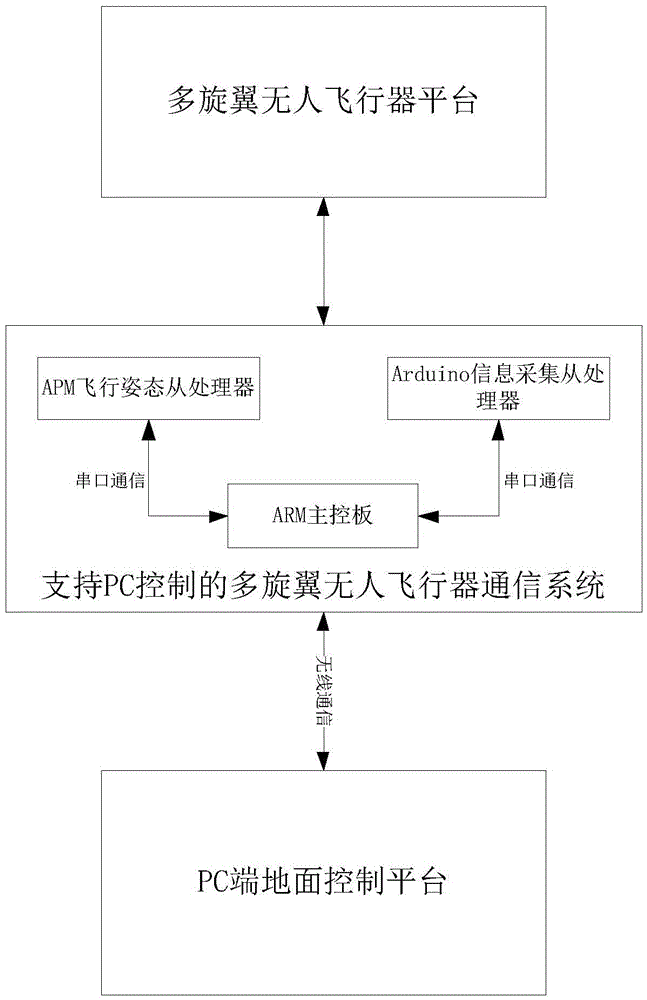
[0045] (1) Multi-rotor unmanned aerial vehicle platform: build a multi-rotor unmanned aerial vehicle based on the existi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More