

Self-adaptive inversion sliding-mode control method and device of nonlinear binary wings
An inverse control and nonlinear technology, applied in the field of flight control, can solve problems such as difficult to meet the safe operation of the aeroelastic system, system flutter, severe wing vibration, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] In order to make the purpose and features of the present invention more obvious and understandable, the specific implementation of the present invention will be further described below in conjunction with the accompanying drawings. However, the present invention can be implemented in different forms and should not be limited to the described embodiments.
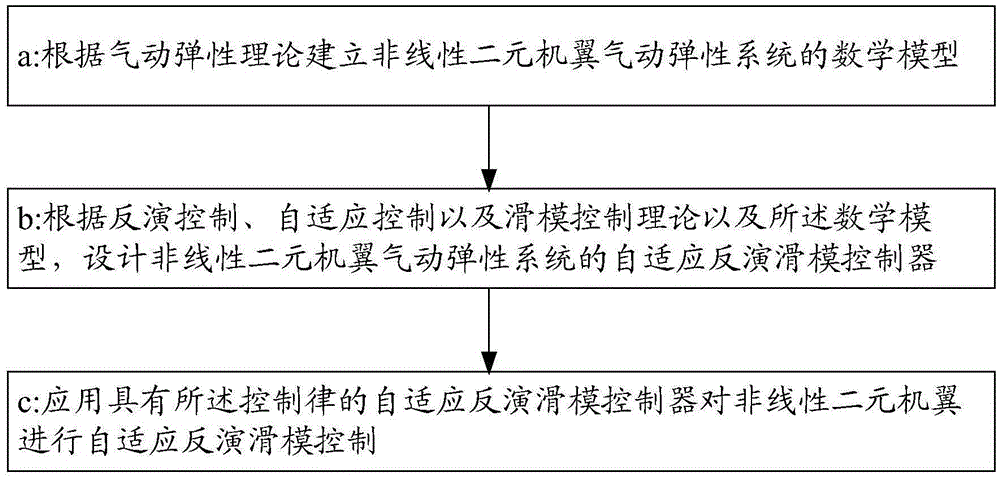
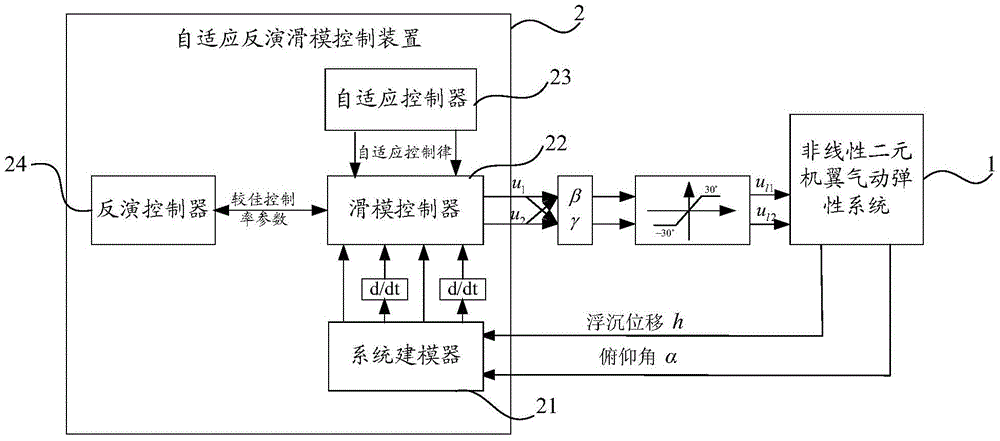
[0099] Please refer to figure 1 , this embodiment provides an adaptive inversion sliding mode control method for a nonlinear binary airfoil, and an adaptive control law is added to the inversion sliding mode control to compensate for the uncertainty and external At the same time, in order to prevent the output control amount from being too large, a limiting link is added to ensure the safety of the control, and an integral link is introduced to reduce the steady-state deviation of the system state, so as to realize the floating and sinking displacement and pitch angle of the binary wing. The tracking control of the no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More