

Active obstacle avoiding method for four-wheel hub drive electric automobile with multiple modes
A hub-driven, electric vehicle technology, applied in the direction of automatic starting devices, brakes, vehicle components, etc., can solve the problems of increasing the driver's manipulation burden, high cost, driver panic, etc., to improve adaptability and acceptability, shorten Turning radius and time, effect of improving driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings.
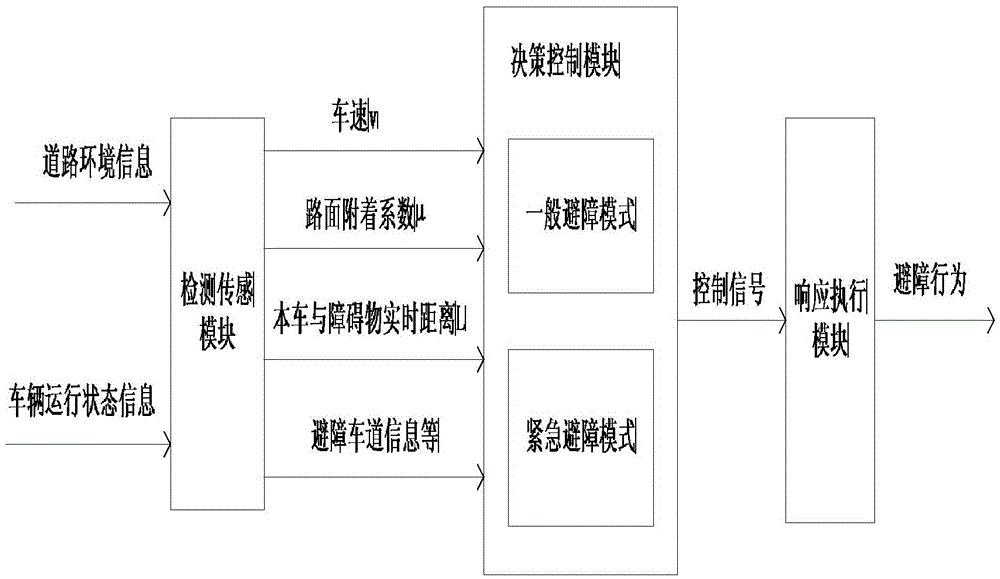
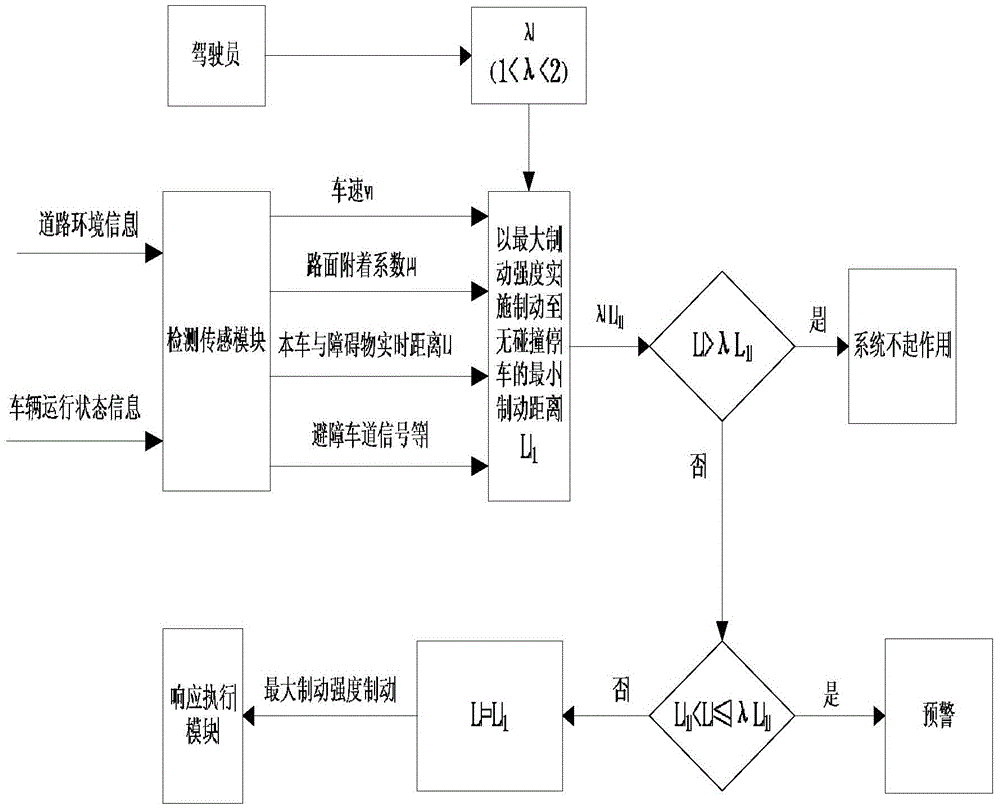
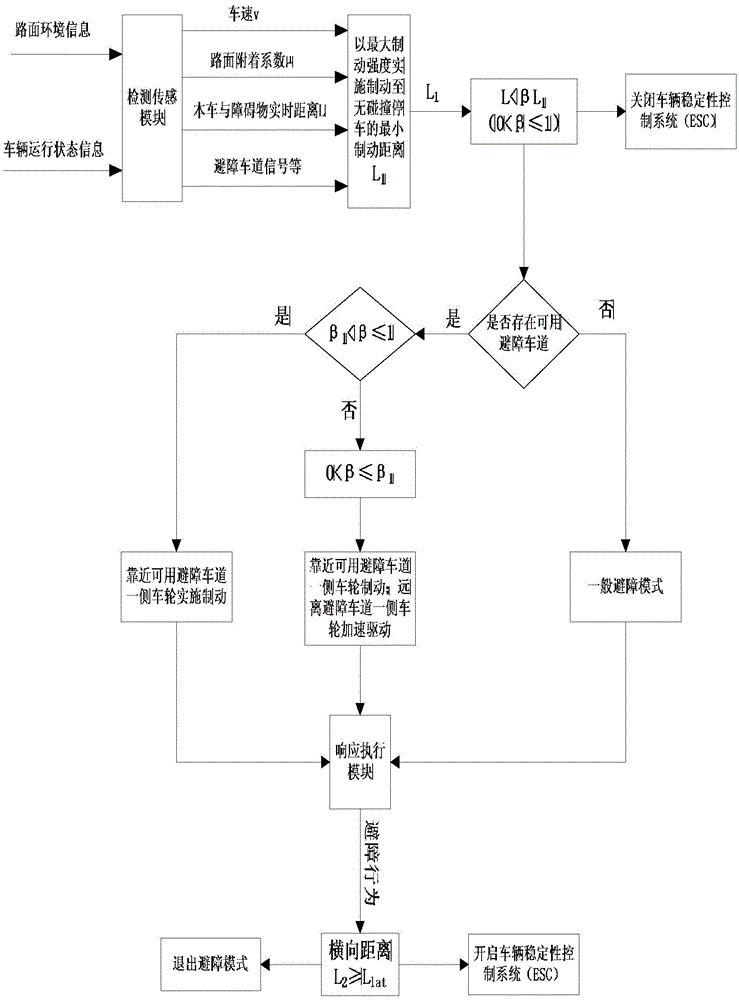
[0035] refer to figure 1 , the whole system includes a detection sensing module, a decision-making control module and a response execution module; the decision-making control module is further divided into a general obstacle avoidance mode and an emergency obstacle avoidance mode for different vehicle speeds. The working principle of the whole system is as follows: the detection sensor module collects road environment information (such as road surface adhesion coefficient μ obstacle avoidance lane information and the real-time distance L between the vehicle and obstacles, etc.) and vehicle operating status information (such as vehicle speed V, etc.), and transmits to the decision control module. The decision-making control module first calculates the minimum distance L required to brake with the maximum braking strength to stop ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More