

Four-degree-of-freedom hybrid shock-resistant mechanical foot for humanoid robot
A technology of humanoid robot and degree of freedom, which is applied in the field of humanoid robot, can solve the problems of inability to simulate subtle movements and inability to resist impact force, etc., and achieve the effect of simple and reasonable structure and high degree of motion posture imitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
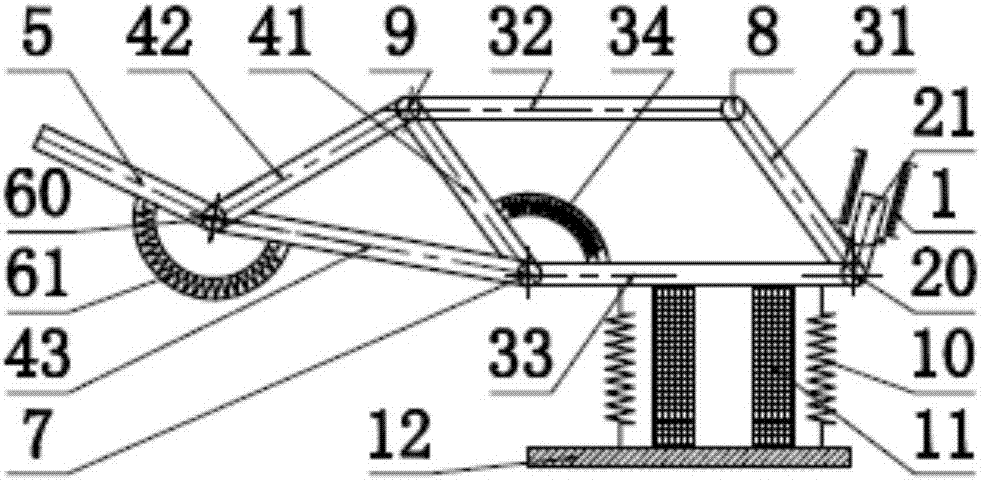
[0012] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0013] see figure 1 As shown, the humanoid robot four-degree-of-freedom hybrid impact-resistant mechanical foot of the present invention includes a mechanical shank 1, a tarsal frame, an ankle axis A20 and an ankle axis B21 connecting the mechanical shank 1 and the tarsal frame, a metatarsal frame, a toe 5, a connection The toe joint 60 of the toe 5 and the metatarsal frame, the sole plate 12, two anti-compression rubber columns 11 and two tensile springs 10 installed between the sole plate 12 and the tarsal frame, installed on the toe 5 and the metatarsal bar C43 The torsion spring B61 between them, and the torsion spring A34 installed between the tarsal bar C33 and the metatarsal bar A41.
[0014] see figure 1 Shown, tarsus skeleton comprises tarsus rod A31, tarsus rod B32 and tarsus rod C33; Tarsus rod A31, tarsus rod B32, tars...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More