

A method for obtaining visual scale coefficient based on machine vision
A technology of proportional coefficient and acquisition method, applied in instruments, measuring devices, optical devices, etc., can solve problems such as meeting the accuracy requirements, unable to determine the visual proportional coefficient, and no feedback verification function.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations. The basic principles of the present invention defined in the following description can be applied to other embodiments, variations, improvements, equivalents and other technical solutions without departing from the spirit and scope of the present invention.
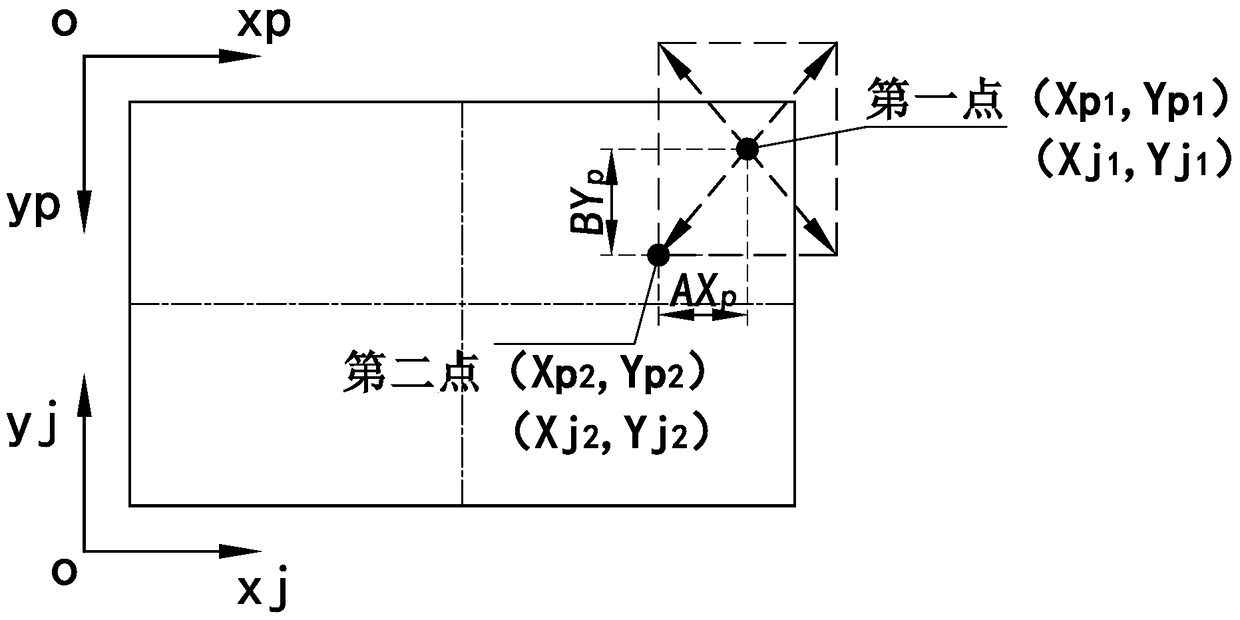
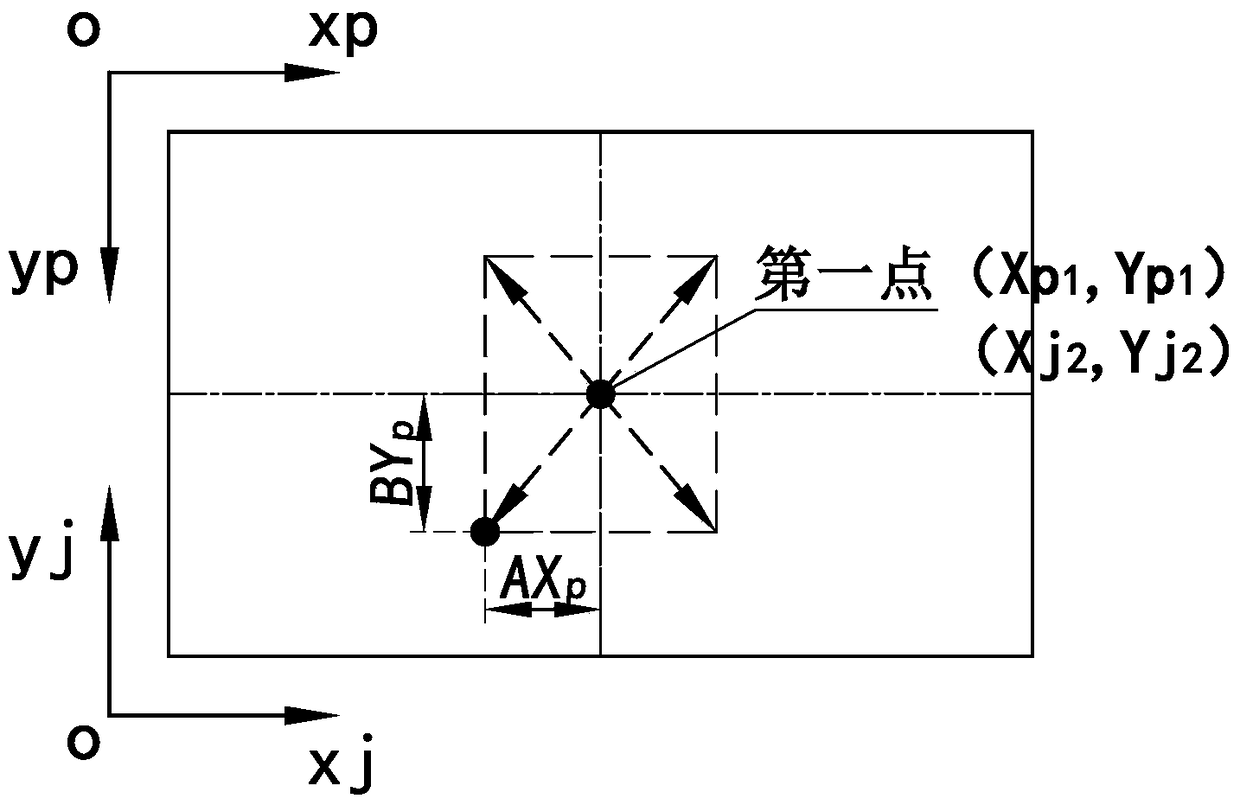
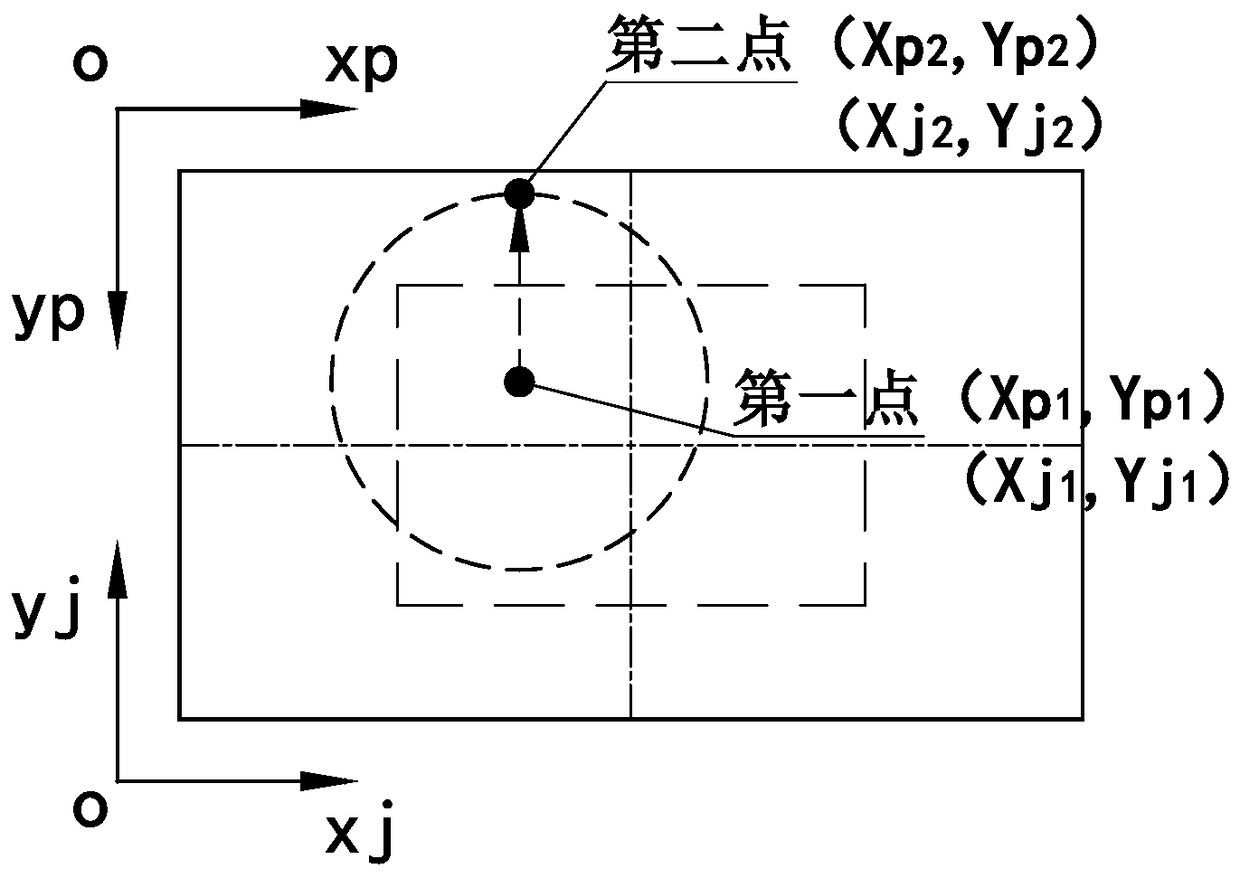
[0031] In practical applications, automation equipment based on machine vision usually includes a camera, a computer control system and an actuator. The camera is used to acquire certain image information. The computer control system is used to process the image information obtained by the camera, and perform certain calculations to obtain the required information. At the same time, the computer control system is used to control the mechanical movement of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More