

Loop tracking method and system.
A loop tracking and branching technology, applied in the field of satellite navigation applications, can solve the problem that the GPS receiver cannot track the satellite signal loop and cannot achieve positioning and navigation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0065] On the basis of the method provided in the first implementation, this embodiment combines specific application scenarios and engineering implementation cases to provide a better technical specific implementation and simulation verification results:
[0066] The selection of the Kalman filter state vector:
[0067] X k =[τ k θ k f k f k '] T
[0068] The 4th-order linear state equation:
[0069] X k+1 = F k+1,k X k +G k f k +W k
[0070] τ θ f f ′ k + 1 = 1 0 Δt λ Δt 2 2 λ 0 1 2 πΔt πΔ t 2 0 0 1 Δt 0 0 0 1 τ θ f f ′ k + - Δt 0 0 - Δt 0 0 0 0 ω code f carr + W k
[0071] In the above equation of state, τ k It is the difference between the real code phase and the local reproduced code phase, the unit is the number of C / A ...
Embodiment 3
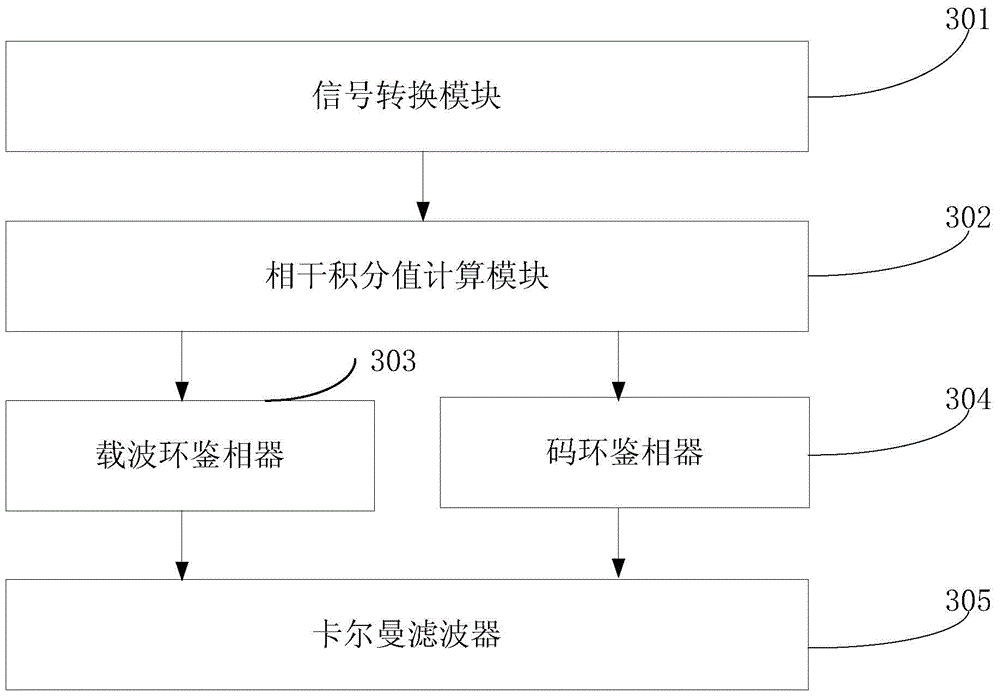
[0088] Corresponding to the methods provided in the first and second embodiments, this embodiment also provides a loop tracking system, such as image 3 The shown system composition architecture diagram, the system includes:
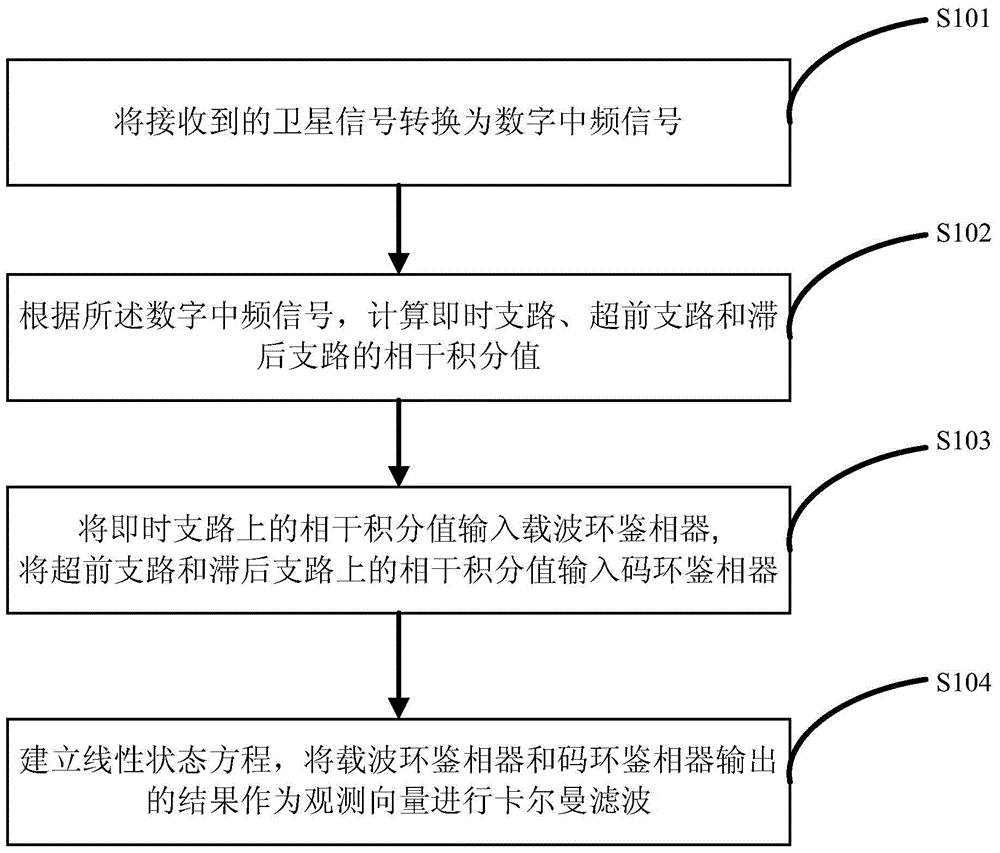
[0089] The signal conversion module 301 is used to convert the received satellite signal into a digital intermediate frequency signal;
[0090] The coherent integral value calculation module 302 is configured to calculate the coherent integral value of the instant branch, the leading branch and the lagging branch according to the digital intermediate frequency signal;
[0091] The carrier loop phase detector 303 is used to process the coherent integral value input on the instant branch;
[0092] The code loop phase detector 304 is used to process the coherent integral input from the leading branch and the lagging branch;
[0093] The Kalman filter 305 is used to establish a linear state equation, and perform Kalman filtering with the output results of the carrier ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More