

Five-finger end effector
An end-effector and five-finger technology, which is used in picking machines, manipulators, chucks, etc., can solve the problems of poor operation, low operation efficiency, and unfavorable long-term preservation of picking operations, and achieves reduction of picking costs, large movement space, and resistance to picking. Strong impact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Below in conjunction with accompanying drawing, the present invention will be further described:
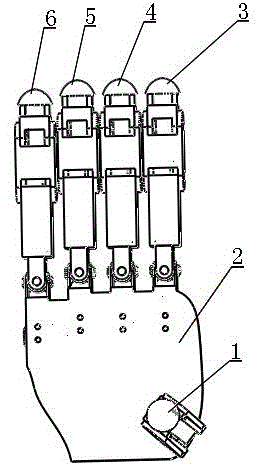
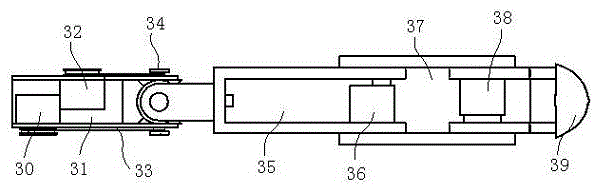
[0034] Figure 1 to Figure 5 A five-finger end effector is shown, including thumb 1 , palm 2 , index finger 3 , middle finger 4 , ring finger 5 and little finger 6 . Thumb 1, index finger 3, middle finger 4, ring finger 5, little finger 6 and palm 2 are firmly connected. Wherein, index finger 3, middle finger 4, ring finger 5 and little finger 6 have the same structure, as in the present embodiment figure 2 As shown, the index finger 3 is taken as an example to illustrate their structural features. Index finger 3 comprises base joint first motor 30, motor slot 31, base joint second motor 32, belt 33, differential mechanism 34, proximal knuckle 35, proximal knuckle motor 36, middle knuckle 37, middle knuckle motor 38, far Knuckles 39 and two connecting shafts 40 . The first motor 30 of the base joint and the second motor 32 of the base joint are installed in the motor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More