

Mobile robot obstacle avoidance method based on Kinect
A mobile robot and robot technology, applied in the field of mobile robots, can solve the problems of oscillation, local minimum point, obstacle avoidance failure, etc., and achieve the effects of strong adaptability, smooth path and good real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
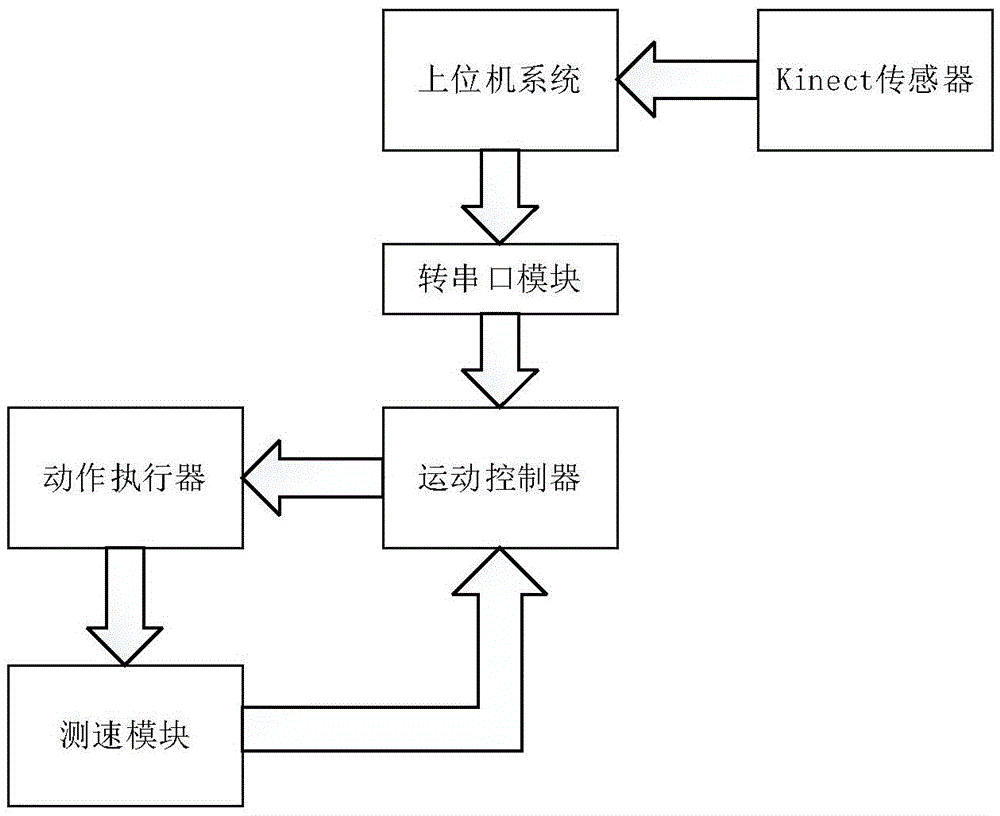
[0042] The system structure diagram of the mobile robot in this scheme is as follows: figure 1 As shown, the robot is a trolley in this embodiment. When the robot is moving, it detects environmental information through the Kinect sensor, and transmits the data to the host computer through the USB interface. The host computer performs obstacle feature extraction, separation and identification of different obstacles through the acquired depth information, and determines the The corresponding obstacle avoidance strategy, combined with the improved artificial potential field method to calculate the moving speed of the car so that it can avoid obstacles, the host computer sends this speed to the embedded motion controller through serial communication, and the motion controller passes the motion actuator Control the movement of the car. In addition, a speed measurement module is also added to this solution. The speed measurement module collects the current speed information of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More