

An interventional surgery robot and its control method for collaboratively pushing a catheter guide wire
A technology of interventional surgery and control method, which is applied in the field of interventional surgery robots in which the catheter and guide wire are pushed together, can solve the problems of low operation accuracy, excessive guide wire clamping, and low accuracy of force measurement, so as to reduce the hidden danger of operation safety and increase the Operation accuracy, the effect of solving push difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings of the specification.
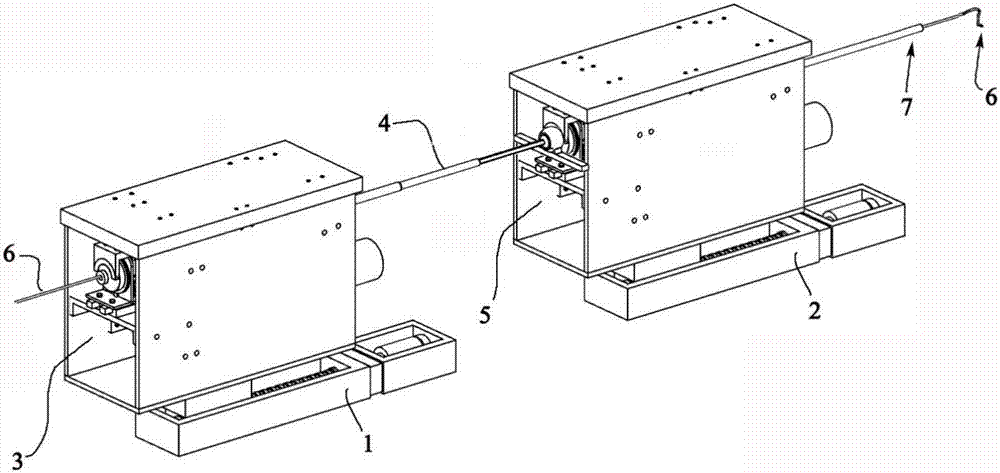
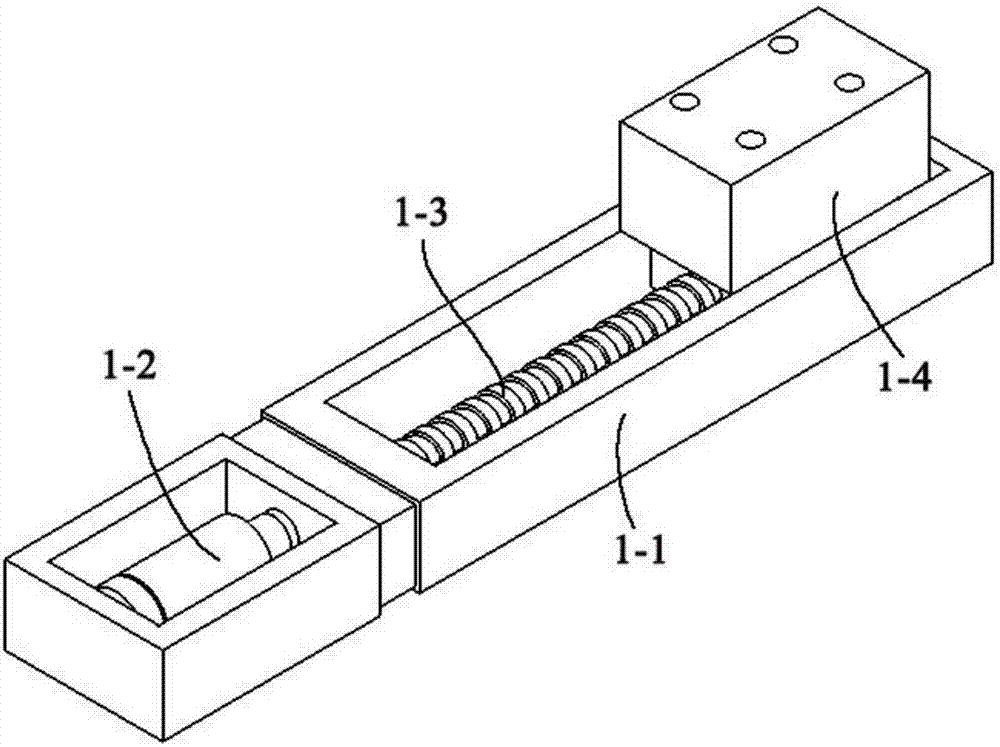
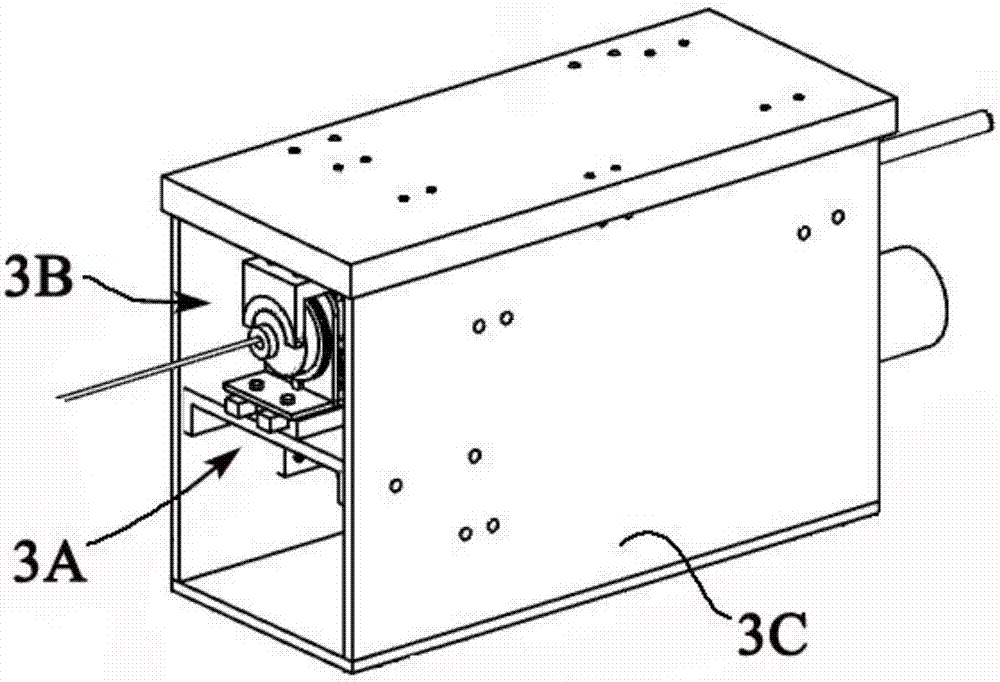
[0059] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 As shown, an interventional surgical robot that pushes a catheter guide wire cooperatively includes a guide wire moving platform 1, a catheter moving platform 2, a guide wire operating end 3, a supporting guide frame 4, a catheter operating end 5, a guide wire 6, and a catheter 7. The guide wire operating end 3 is arranged on the guide wire moving platform 1, the catheter operating end 5 is arranged on the catheter moving platform 2, and the two ends of the supporting guide frame 4 are respectively connected to the guide wire operating end 3 and The catheter operating end 5 is connected, the catheter 7 passes through the catheter operating end 5, and the guide wire 6 is arranged in the catheter 7 and passes through the guide wire operating end 3. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More