

Orthopaedics operation robot
A technology of orthopedic surgery and robotics, applied in surgical robotics, surgery, medical science, etc., can solve the problems of low precision in performing complex actions, large differences in surgical quality, and long operating time, so as to reduce medical costs and shorten treatment time , the effect of reducing the incidence of
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with the accompanying drawings.
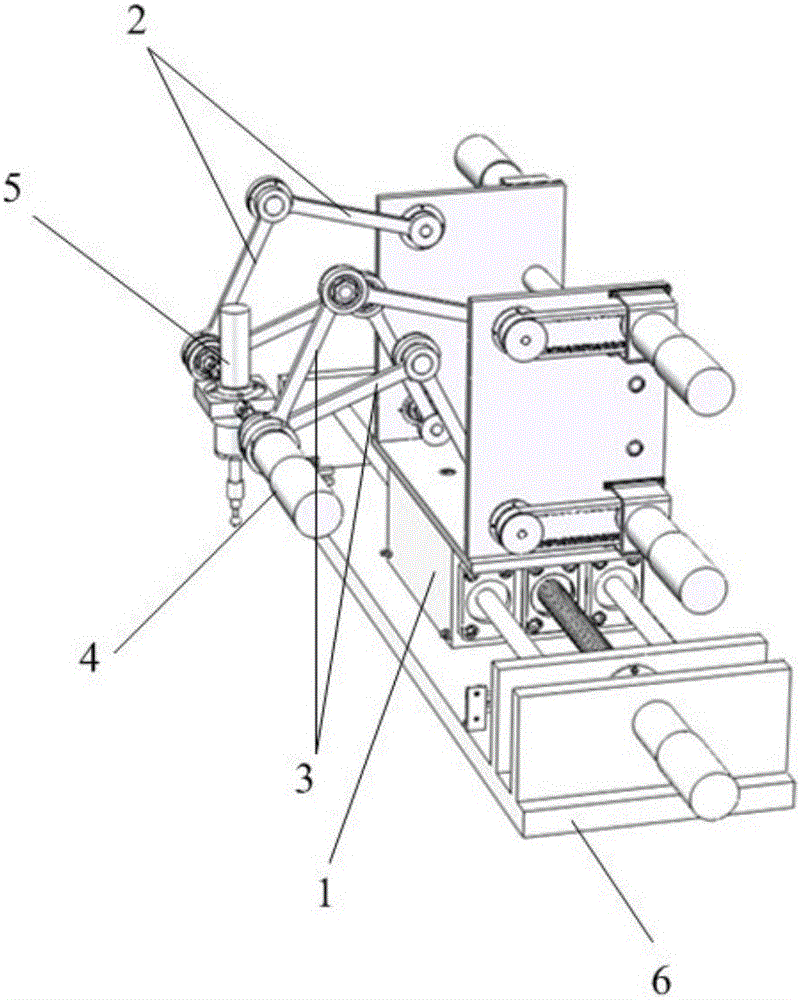
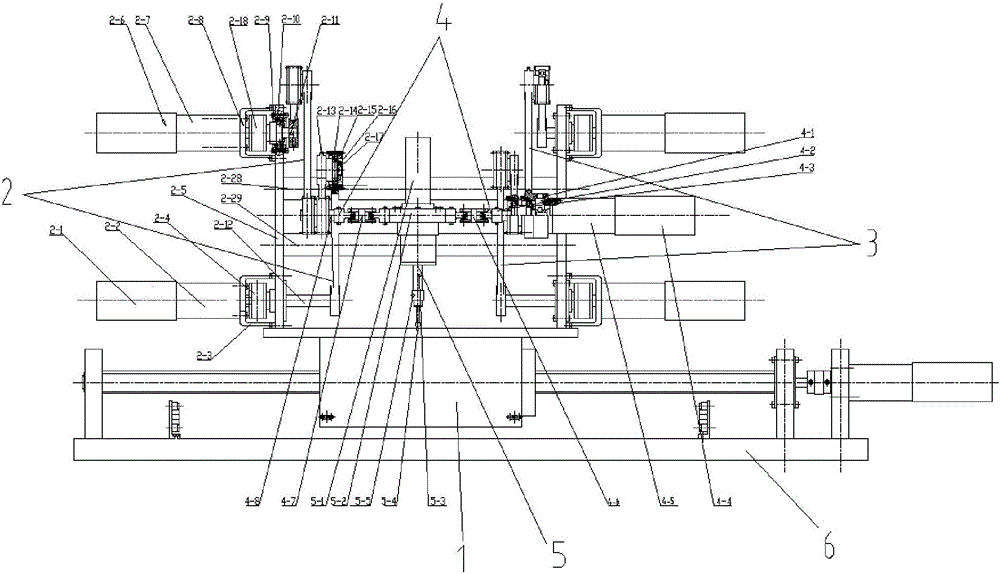
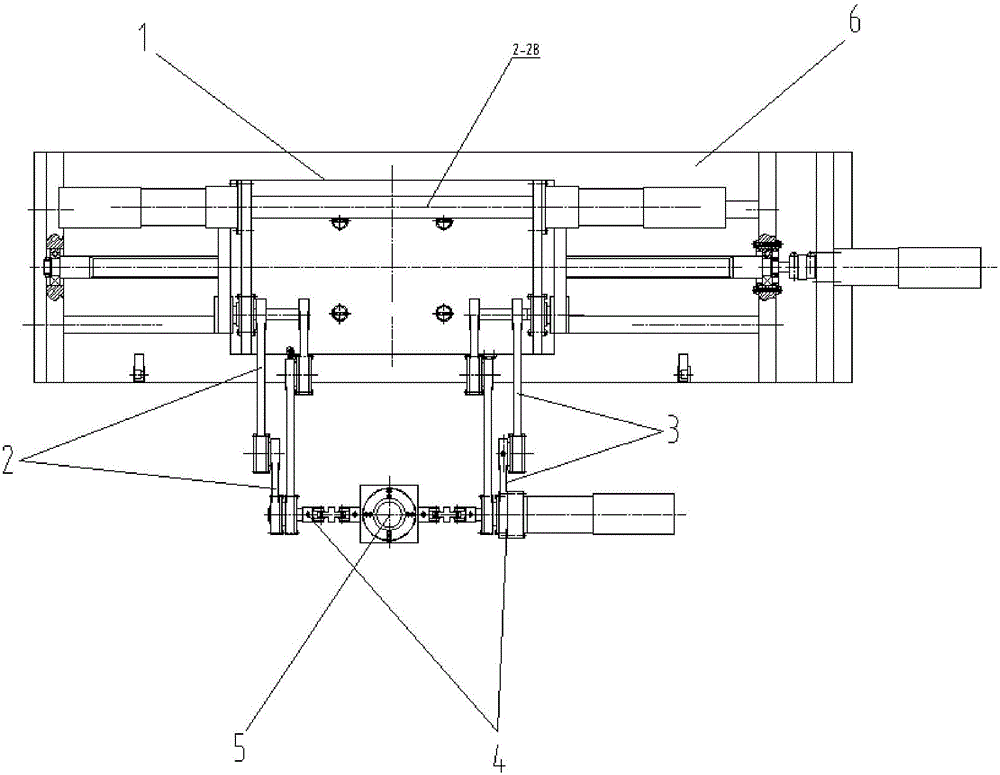
[0053] As shown in the figure, the minimally invasive orthopedic surgery robot of the present invention includes a base 6, a mobile platform 1, a first five-bar linkage mechanism 2, a second five-bar linkage mechanism 3, a drill attitude adjustment mechanism 4 and a drill drill 5 Six components.
[0054] Such as Figure 2 to Figure 5 As shown, the base is the supporting part of the whole robot, and the mobile platform 1 is connected with the base by means of screw nut pairs, and the two feed rods 1-5, 1-6 guide the mobile platform 1 and connect with the base Reinforcement, the mobile platform 1 constitutes a series degree of freedom of the robot, and realizes the horizontal movement of the five-link mechanism 2 and 3, the grinding-drilling mechanism 5 and the grinding-drilling attitude adjustment mechanism 4, and the two links of the five-link mechanism 2 and the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More