

Design Method of Nonlinear Robust Controller Based on Backstepping and Sliding Mode Control
A technology of robust controller and design method, applied in attitude control, adaptive control, general control system, etc., can solve the problems of inaccurate model, nonlinearity, realization and large-scale promotion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
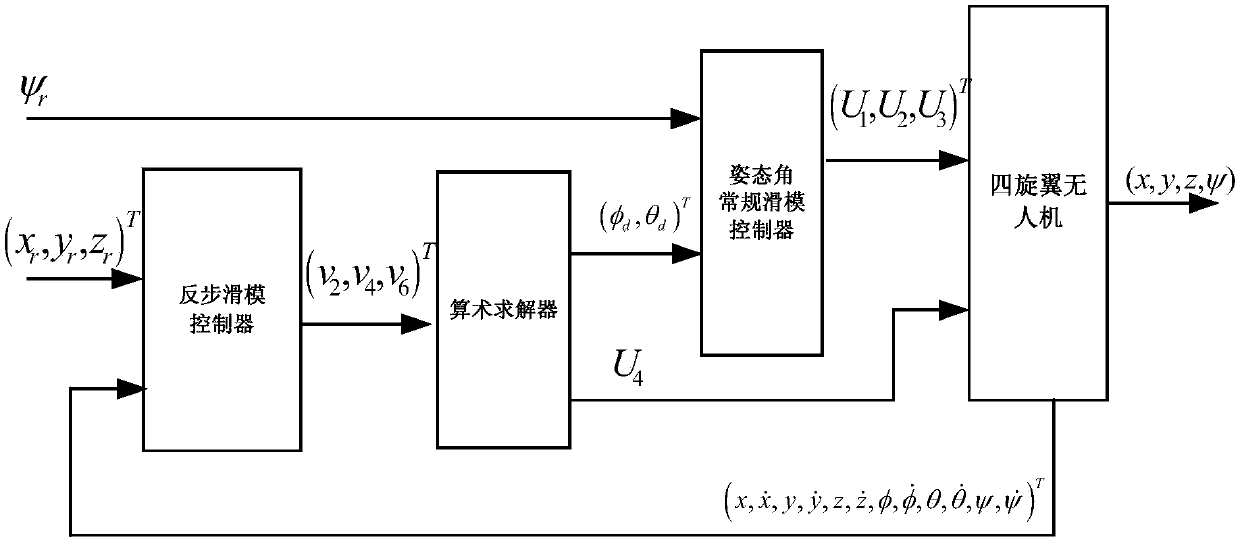
[0087] A design method for nonlinear robust controllers based on backstepping and sliding mode control, such as figure 1 As shown, firstly, the sliding mode controller is designed for the attitude angle subsystem of the quadrotor UAV system. Through the selection of the reaching law, the fast tracking of the attitude angle to the desired attitude angle trajectory is ensured. On this basis, starting from the performance index of the outer loop of the system, the nonlinear backstepping control method is used to track the position and trajectory of the quadrotor UAV system, and the actual input control law that meets the performance requirements is designed.
[0088] Such as figure 1 As shown, it specifically includes the following steps:
[0089] Step 1, obtain the actual position trajectory, position reference trajectory and yaw angle reference trajectory of the quadrotor UAV; in order to ensure that the actual position trajectory (actural trajectory)) trajectory of the quadro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More