Orbit-change mechanism control system for electric power tunnel inspection robot and method
A technology for inspection robots and power tunnels, which is applied in the installation of cables, electrical components, and cables in tunnels. It can solve the problems of not being able to work at close distances, and fixed monitoring can only be done at fixed points, so as to reduce equipment investment costs and maintenance. The effect of cost and high level of artificial intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
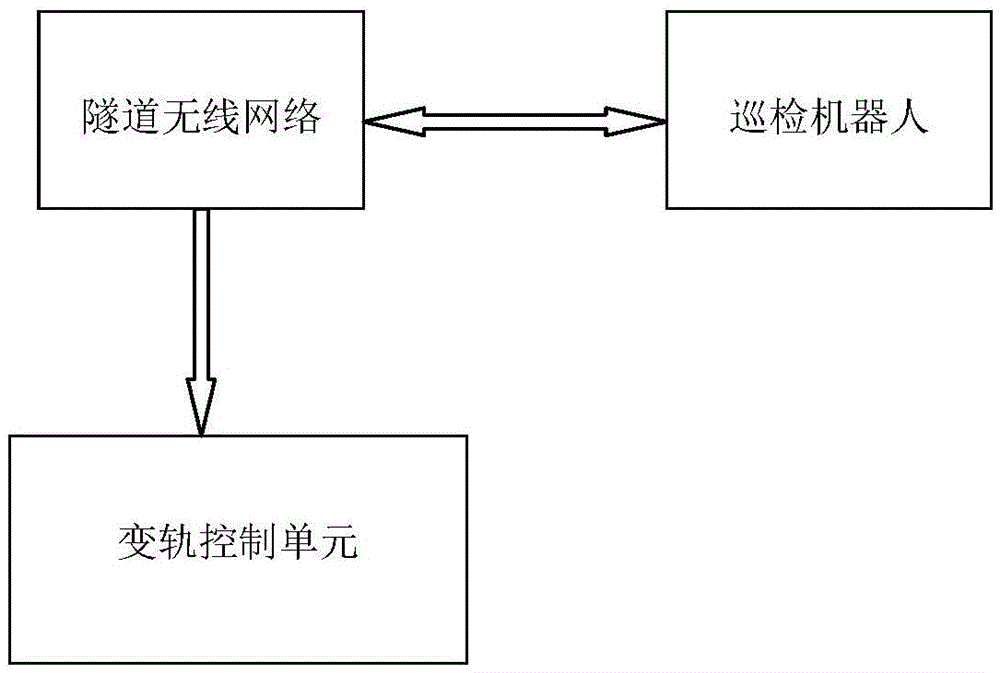
[0050] Such as figure 1 As shown in Fig. 1, a power tunnel inspection robot annual track change control system, including inspection robot, tunnel wireless network and track change control unit.
[0051] The track change control unit is composed of a local control box, a motor driver, a motor, a control feedback sensor and a track change device, and the track change and track change in-position detection are realized through these components.
[0052] The tunnel wireless network is composed of the main pole fiber optic switch and the wireless coverage AP access point, which is responsible for the tunnel wireless signal coverage and the access of the nearby wired and wireless network equipment;
[0053] The inspection robot accesses the remote control track change control unit through the wireless network.
[0054] The CPU in the control box drives the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com