

Laser navigation system applicable to intelligent inspection robot of transformer substation
A technology of laser navigation and intelligent inspection, applied in the field of laser navigation, can solve the problems that the positioning accuracy of robot navigation control still needs to be improved, and achieve the effect of simple and easy-to-use external interface, low development cost, and accurate navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
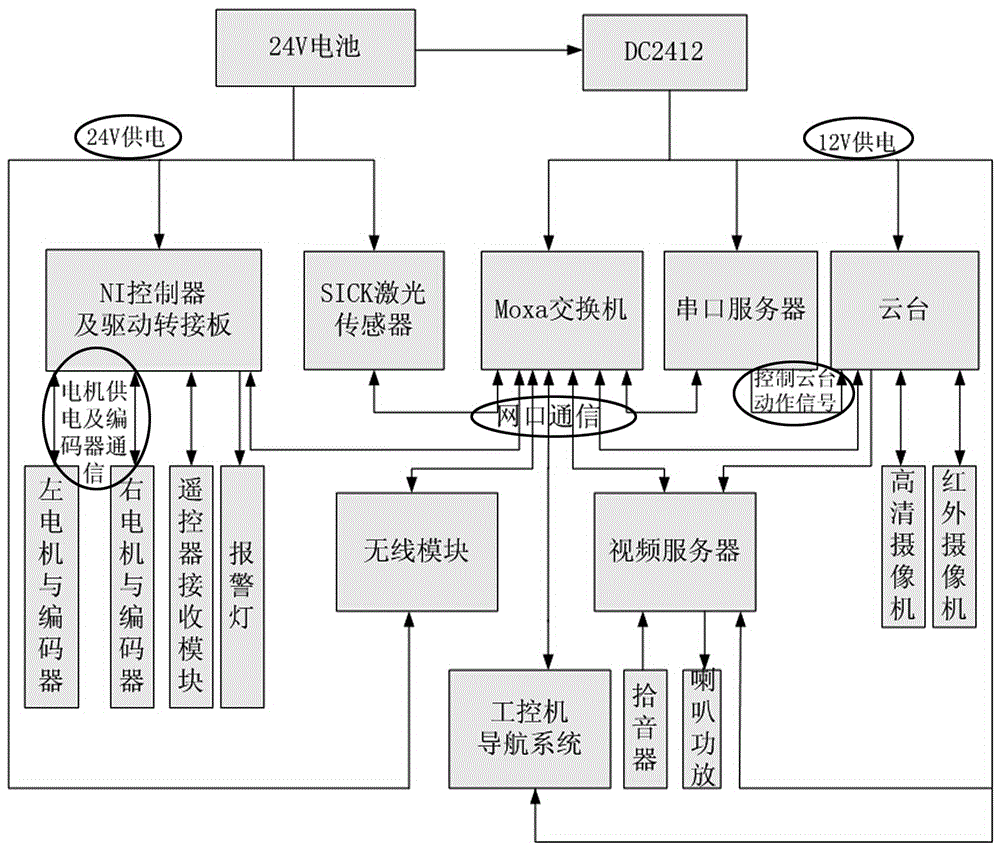
[0023] The laser navigation system applicable to the substation intelligent inspection robot of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments: figure 1 As shown, the technical solution adopted by the hardware system of the present invention is: a laser navigation substation intelligent inspection robot, which includes a chassis, which is provided with a 24v rechargeable battery, a DC2412 transformer, a motion controller, a drive motor, a remote control receiving module, and an alarm Lights, laser sensors, MOXA switches, serial servers, PTZ pillars, industrial computers, video servers, wireless modules. Among them, the motion controller, laser sensor and wireless module are powered by 24V voltage, and the motion controller is respectively connected with the drive motor, remote control receiving module, and alarm light; MOXA switch, serial server, industrial computer, video server and pan-tilt controll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More