

Combined navigation method of joint entropy extended Kalman filter based on strong tracking
An extended Kalman, integrated navigation technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problem of not considering model uncertainty and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0074] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
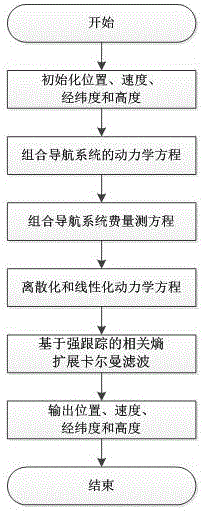
[0075] An integrated navigation method based on strong tracking correlation entropy extended Kalman filter, its flow chart is as follows figure 1 shown, including the following five steps:
[0076] Step 1. Establish the dynamic equation of the SINS / GNSS integrated navigation system
[0077] In the northeast sky geographic coordinate system, the dynamic equation of the SINS / GNSS integrated navigation system is
[0078] φ · E = ( ω i e sin L + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More