

Dead zone characteristics considered servo system finite-time control method
A control method and servo system technology, applied in the direction of observer control, adaptive control, general control system, etc., can solve problems affecting system tracking accuracy and dynamic characteristics, nonlinearity, affecting system dynamic characteristics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below in conjunction with the drawings.
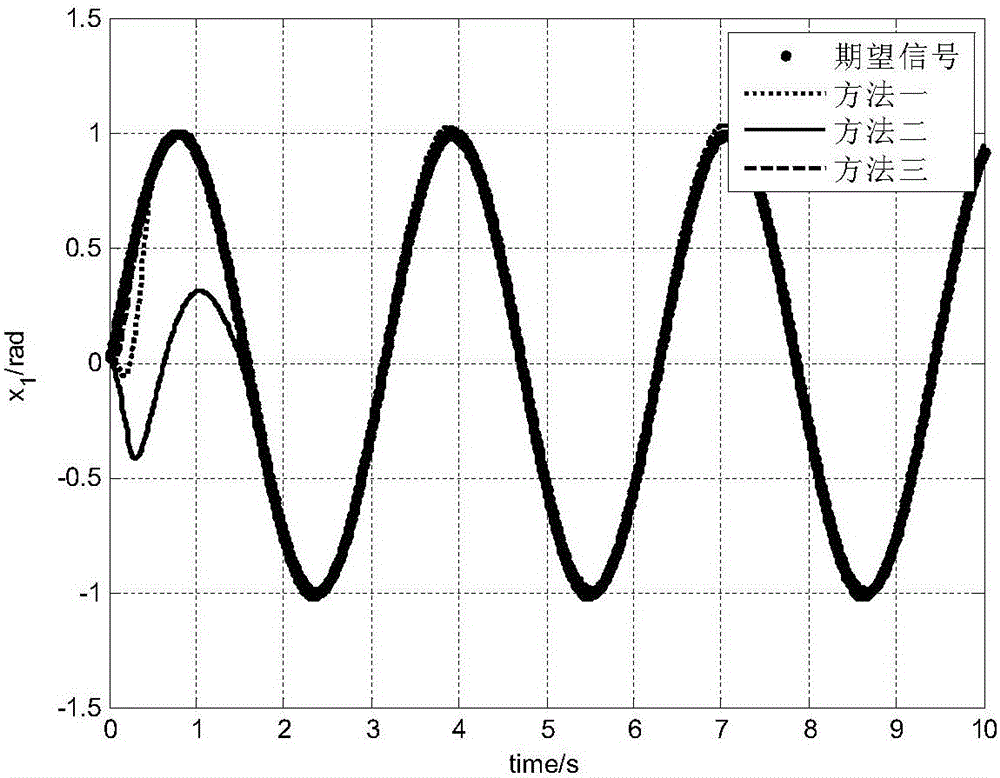
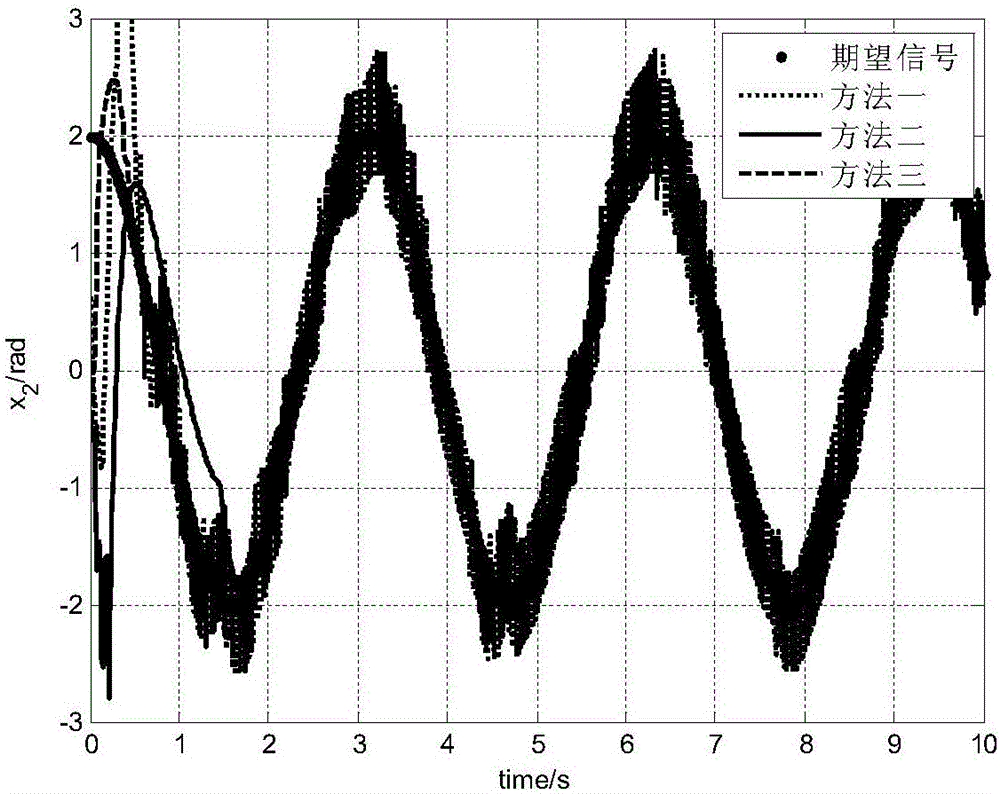
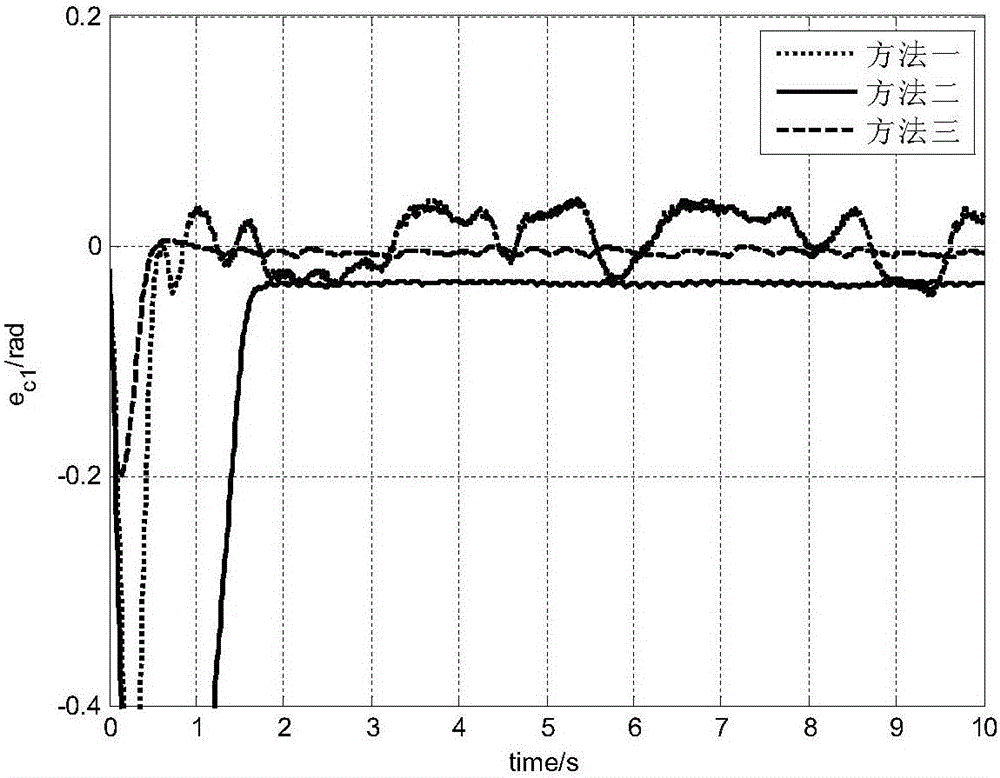
[0074] Refer to Figure 1- Figure 5 , A finite time control method of a servo system considering the characteristics of the dead zone, including the following steps:
[0075] Step 1. Establish the servo system model as shown in formula (1), initialize the system state and control parameters;
[0076]
[0077] Where θ m , Is the state variable, which respectively represents the position and speed of the motor output shaft; J and D are the equivalent moment of inertia and equivalent damping coefficient converted to the motor shaft; K t Is the motor torque constant; v(u) is the control quantity with dead zone characteristics, b ir ,b il They are the upper and lower boundaries of the dead zone characteristics, u is the output of the controller; T is the load friction torque converted to the motor shaft and the friction disturbance part;
[0078] Step 2. Approximate processing of the dead zone...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More