

Gain-scheduled control method for a three-degree-of-freedom helicopter
A gain scheduling control, helicopter technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as harsh hardware requirements, affecting system accuracy, and no global control effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The design process of the present invention, that is, the control effect, will be described below in conjunction with the accompanying drawings:
[0100] The gain scheduling control method for a three-degree-of-freedom helicopter of the present invention includes the following steps:
[0101] Step 1. Establish the LPV model of the three-degree-of-freedom helicopter system
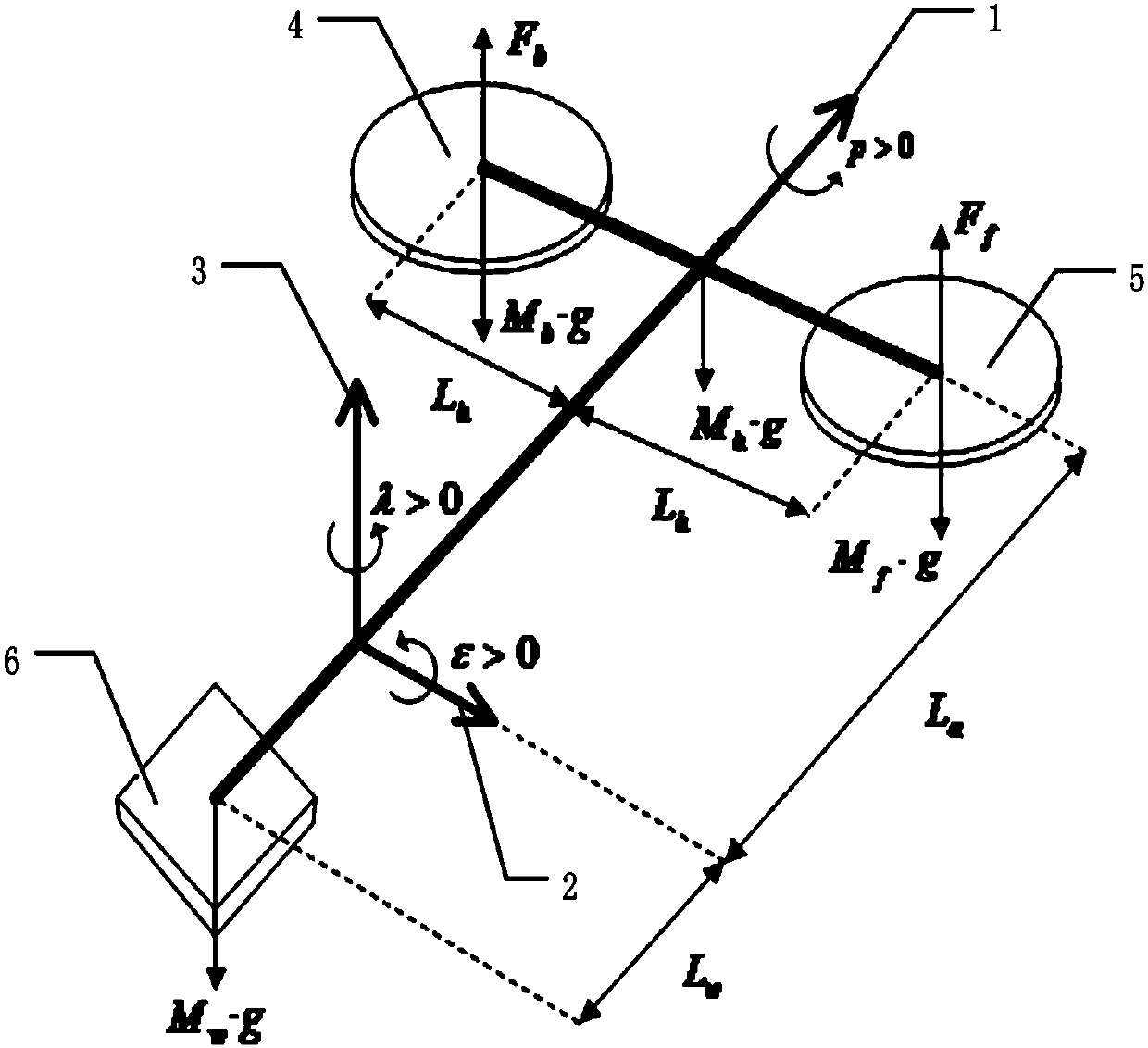
[0102] 1.1. The main structure and force of the three-degree-of-freedom helicopter system are as follows figure 1 As shown in the figure, axis 1 represents the height axis, axis 2 represents the pitch axis, axis 3 represents the rotation axis, structure 4 is the front motor, structure 5 is the rear motor, and structure 6 is the counterweight. First establish the height axis motion equation. The front and rear motors of the helicopter drive the propellers, and the lift generated is F respectively f With F b , The sum of lift is F m = F f +F b , The quality of the front and rear propellers is the same, M f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More