

Scara robot trajectory tracking control method based on predictive indirect iterative learning
An iterative learning and trajectory tracking technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of driver torque signal compensation, cannot be modified online, etc., to improve tracking accuracy, speed up iterative convergence speed, and eliminate external interference. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the objectives, technical solutions, and beneficial effects of the present invention clearer, the present invention will be further described in detail with reference to the accompanying drawings.
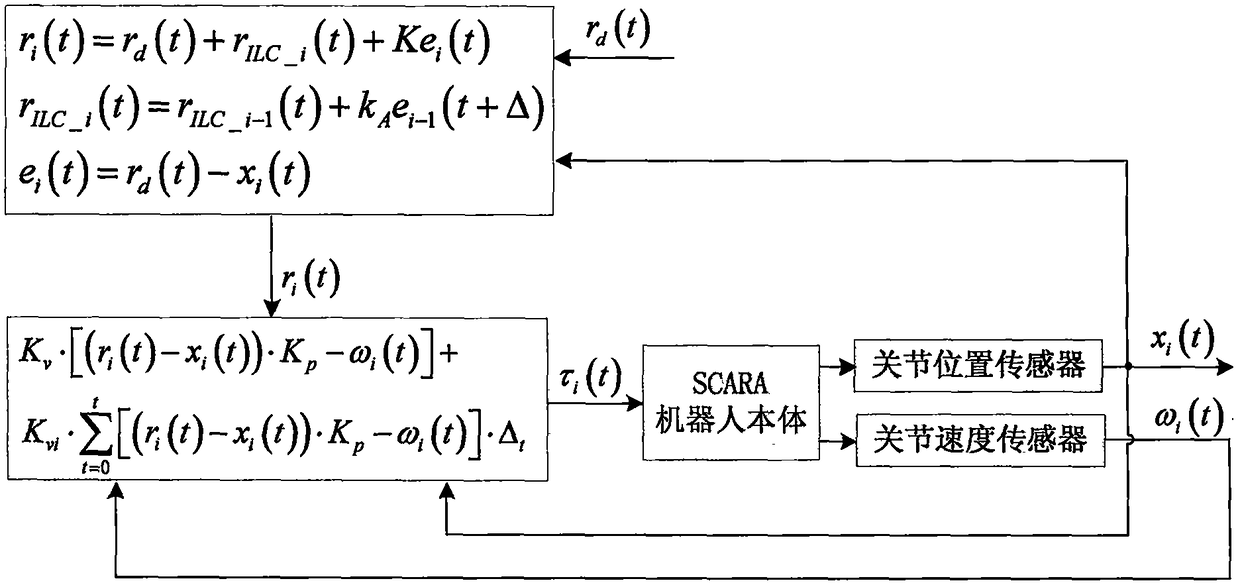
[0030] The present invention provides a structure diagram of a SCARA robot trajectory tracking control method based on predictive indirect iterative learning, such as figure 1 Shown. The dual closed-loop feedback controller acts on the robot body to track the joint position and joint speed. On this basis, a predictive iterative learning controller with feedforward function is designed to improve the dynamic performance of the dual-closed-loop feedback controller and improve the trajectory Tracking accuracy. According to the joint position data output by the encoder, the predictive iterative learning controller uses the position tracking error of the previous run batch at the sampling time t+Δ to optimize and adjust the position setting of the current run at th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More