High-speed high-precision path dynamic forward-looking planning method
A high-precision, path technology, applied in the field of numerical control, can solve the problems of complex calculation, difficult to guarantee contour accuracy, and inapplicable to real-time systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below with reference to the drawings and embodiments.
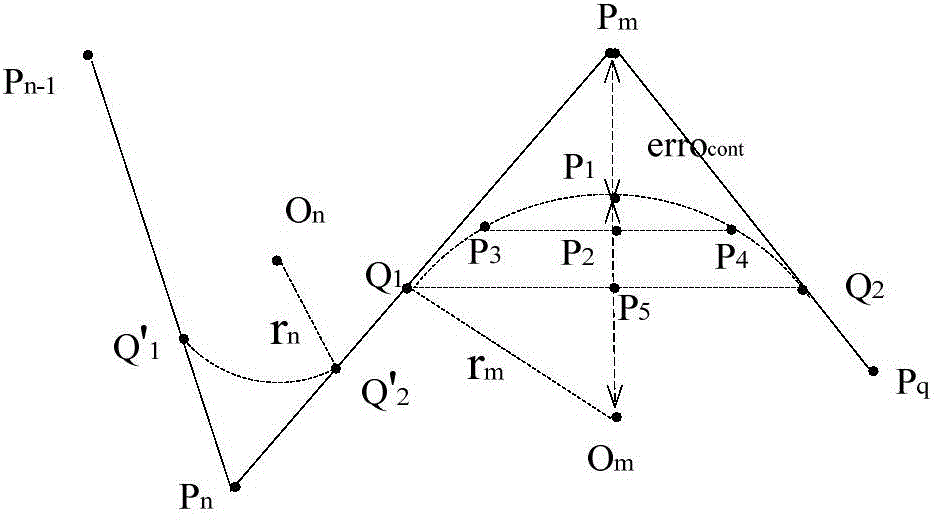
[0037] Step 1: According to the relationship between adjacent processing paths represented by line segments, plan the initial value of the transition arc radius. Suppose it is corner P n P m P q Carry out path planning, erro chord_max Indicates the maximum bow height error allowed by the system, erro contour_max Indicates the maximum contour error allowed by the system, at this time, erro max The values are as follows:
[0038] erro max =erro contour_max -erro chord_max
[0039] L p m Q 1 = cos θ / ( 1 - sin θ ) erro max r m = sin θ / ( 1 - sin θ ) erro max erro max = erro contour - erro chord - - - ( 1 )
[0040] Will erro max Incorporating formula (1), the initial radius of the transition arc can be obtained as follows:
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More