

Fruit picking robot based on efficient picking disc
A technology for picking robots and fruits, applied in the directions of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of labor and cost reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
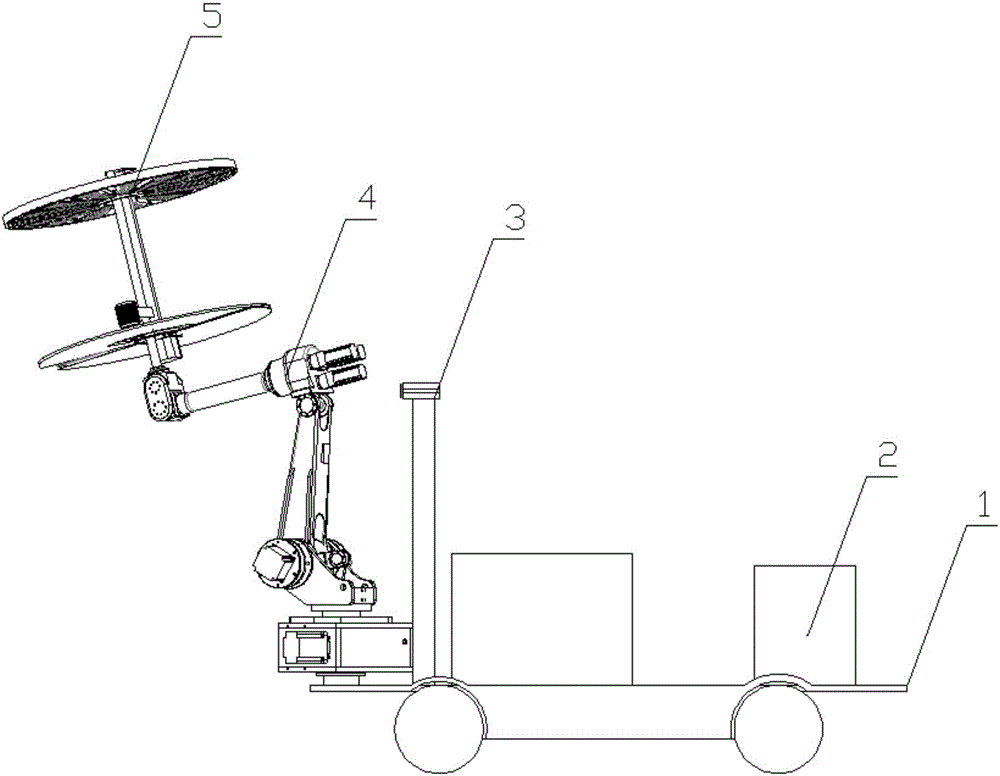
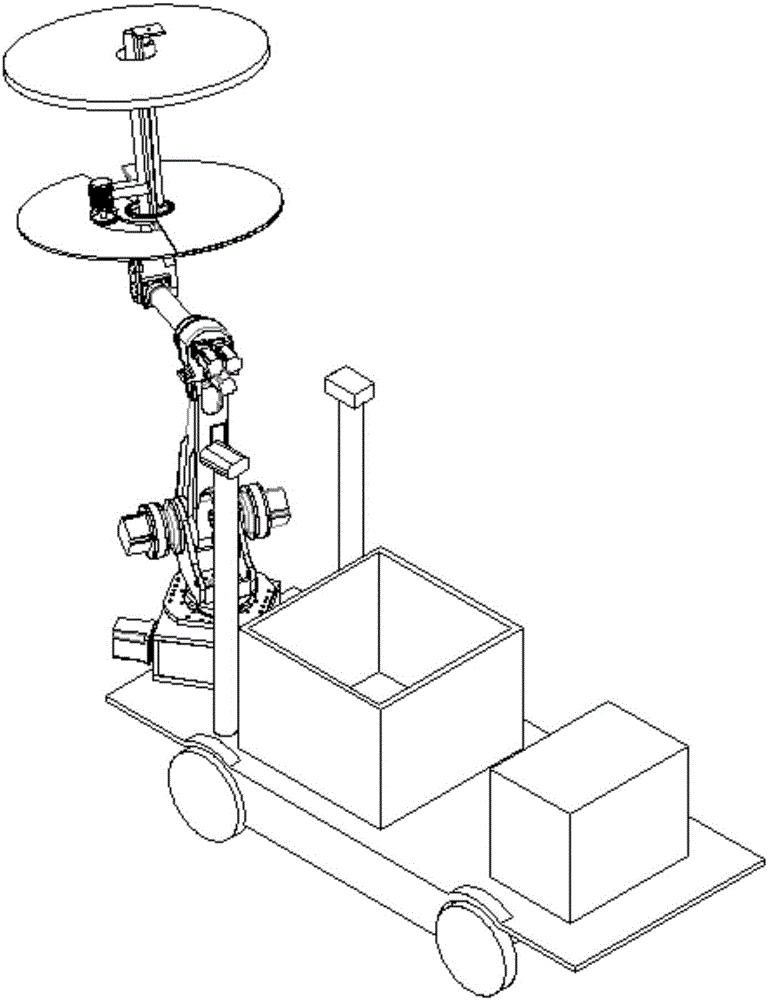
[0057] Such as figure 1 , 2 , 3 and 4, a fruit picking robot based on picking discs includes four-wheel intelligent platform 1, control system 2, image recognition system 3, picking arm 4 and picking disc 5.
Embodiment 2
[0059] Such as figure 1 , 2 , 3 and 4, the four-wheel intelligent platform 1 is mainly a four-wheel mobile vehicle, as the mobile carrier of the control system 2, the image recognition system 3, the picking arm 4 and the picking disc 5, which drives the above-mentioned mechanism to move.
[0060] The control system 2, as the core of the picking robot, mainly realizes the electrical control of the picking robot system and the like.
[0061] The image recognition system 3, as the information input of the picking robot, mainly uses the binocular camera to collect images and videos of external fruits and branches, and then analyzes, processes and judges, and sends the final data to the control system 2.
[0062] The picking arm 4 is mainly a manipulator with 4-6 degrees of freedom. The higher the degree of freedom of the manipulator, the more flexible the area that can be picked. The function of the picking arm 4 is to drive the picking plate 5 to move to the area to be picked, a...
Embodiment 3
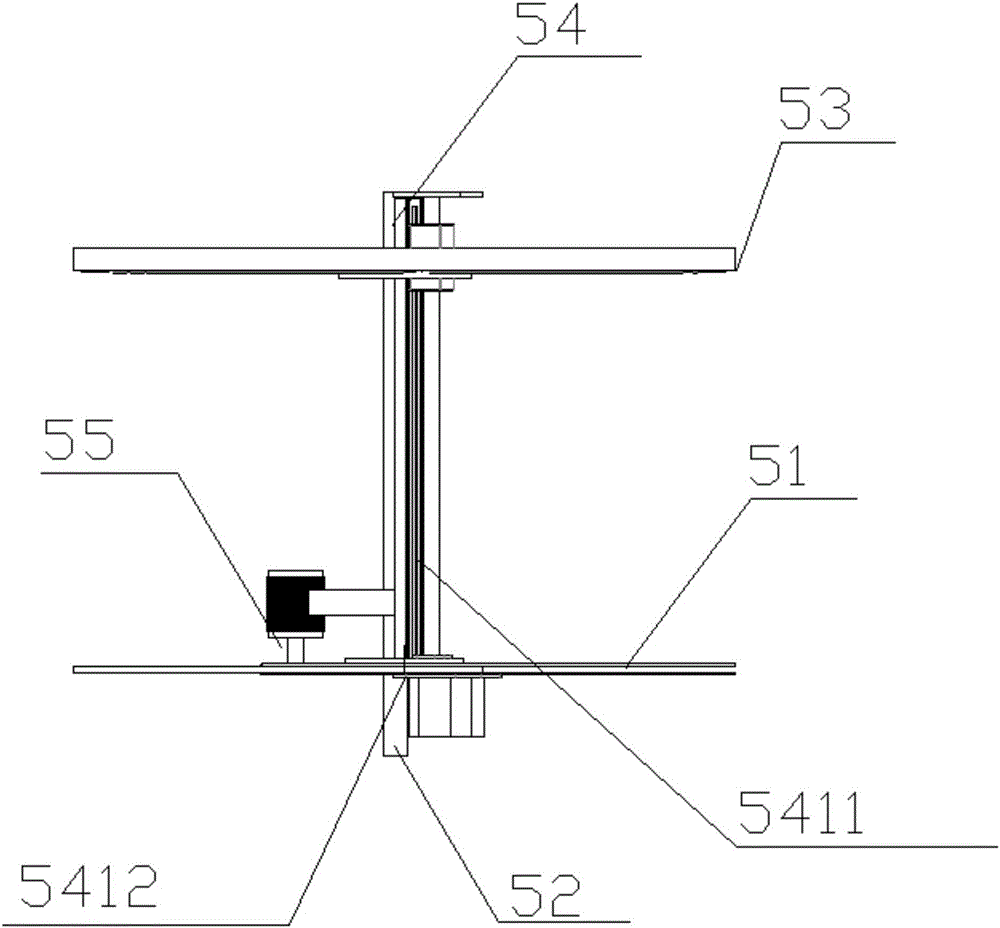
[0064] Such as figure 1 with Figure 5-7 As shown, the picking disc 5 is used as the core part of the picking mechanism, and mainly utilizes the picking method of combing to realize the picking of branch-like distributed fruits. Rotary mechanism 55.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More