

Endoscope robot control method and device based on pressure sensor information
A technology of endoscopic robot and pressure sensor, applied in the direction of endoscope, rectoscope, rectal electron microscope, etc., can solve problems such as intestinal injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
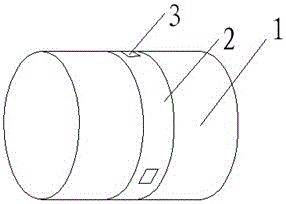
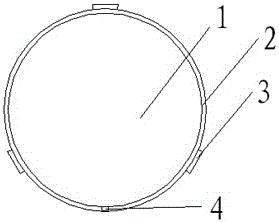
[0056] see Figure 1 to Figure 5 , as shown in the illustration, the pressure sensor includes a stainless steel substrate 2 and three resistance strain gauges 3, the stainless steel substrate 2 surrounds the middle of each joint 1 along the circumference, and the three resistance strain gauges 3 are evenly distributed along the circumference Set on the stainless steel base sheet 2, the stainless steel base sheet 2 has two connection ends, when the stainless steel base sheet 2 is wrapped around the joint 1, the above two connection ends are connected together and form a connection point 4, one of the resistance strain gauges 3 and The connection point 4 is arranged symmetrically with respect to the central point of the surrounding stainless steel base sheet 2, and the other two resistance strain gauges 3 are symmetrical with respect to the connection point 4. The stainless steel base sheet 2 has an inner diameter of 13 mm and a thickness of 0.1 mm after being surrounded by stain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More