

An electric power-assisted four-wheel vehicle and its power-assisted control method
A control method and technology for four-wheeled vehicles, which are applied in the directions of electric vehicles, control drives, motorcycles, etc., to achieve the effects of simple structure, prolonged use time, and reliable operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
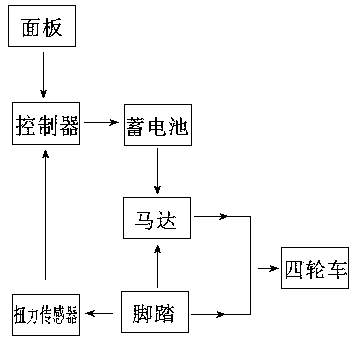
[0031] Such as figure 1 As shown, the present invention provides an electric-assisted four-wheel vehicle, which includes a motor connected to a battery and a pedal, a torque sensor is also provided on the pedal shaft, and a device for setting the operating parameters of the vehicle is arranged in the cab. The panel and the controller, the controller receives the parameters input by the torque sensor and the parameters set by the panel for comparison and calculation, and then controls the output power of the motor. The vehicle operating parameters include several items in the maximum value of manpower, the time interval for the system to collect torque values, and the correction coefficient of output power.
[0032] The physical strength and desired amount of exercise of different drivers and passengers are different, which can be set initially so that the present invention can be adapted to the needs of different drivers and passengers; the time interval for the system to coll...
Embodiment 2
[0044] A power assist control method for an electric-assisted four-wheel vehicle, the difference from Embodiment 1 is that when the circuit is connected, the controller controls the change of the output power of the motor according to the change of the torque value input by the torque sensor for a certain period of time according to the following formula size:
[0045] P t =P 0 +(P max -P 0 )*Sin{arctg[(l-l t ) / t]},
[0046] In the formula: P t Output power at time t;
[0047] P 0 output power at time 0;
[0048] P max The maximum output power of the battery;
[0049] l initial torque value;
[0050] l t Torque value at time t;
[0051] tTorque change time interval.
[0052] The boost control method provided by the present invention is based on the following principle. First, record the corresponding relationship between torque and time in a plane coordinate system, with X-axis as time and Y-axis as torque value. The torque value corresponding to a certain init...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More