

Calculating method for optimal route of unmanned aerial vehicle used for positioning object in threat environment
A technology of target positioning and calculation method, applied in the field of target positioning and tracking, UAV route planning, can solve problems that are difficult to meet the actual application requirements, and achieve the effect of improving survival efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] 1. Establish an azimuth-only positioning model for a single UAV.
[0022] 2. The self-adaptive motion of the UAV is used to locate and track stationary targets and low-speed moving targets respectively. The criterion for the self-adaptive motion of the UAV is to maximize the accuracy of target positioning.
[0023] 3. Establish a mathematical model of the enemy's threat and evaluate the degree of threat.
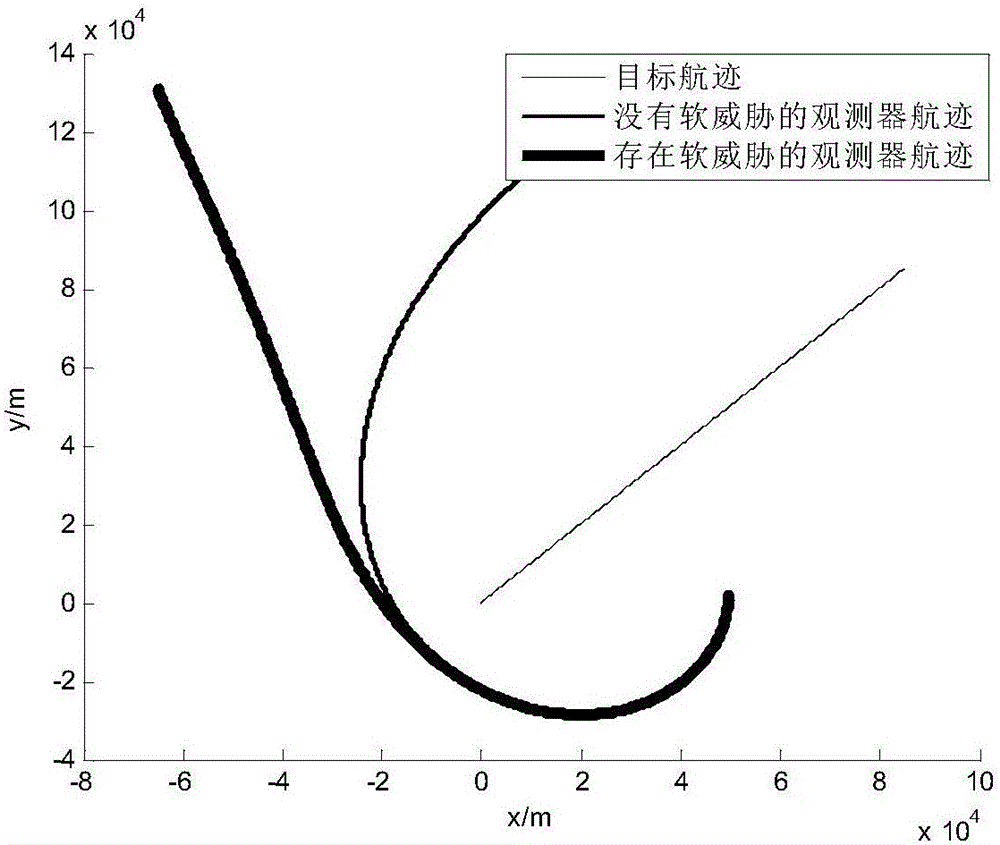
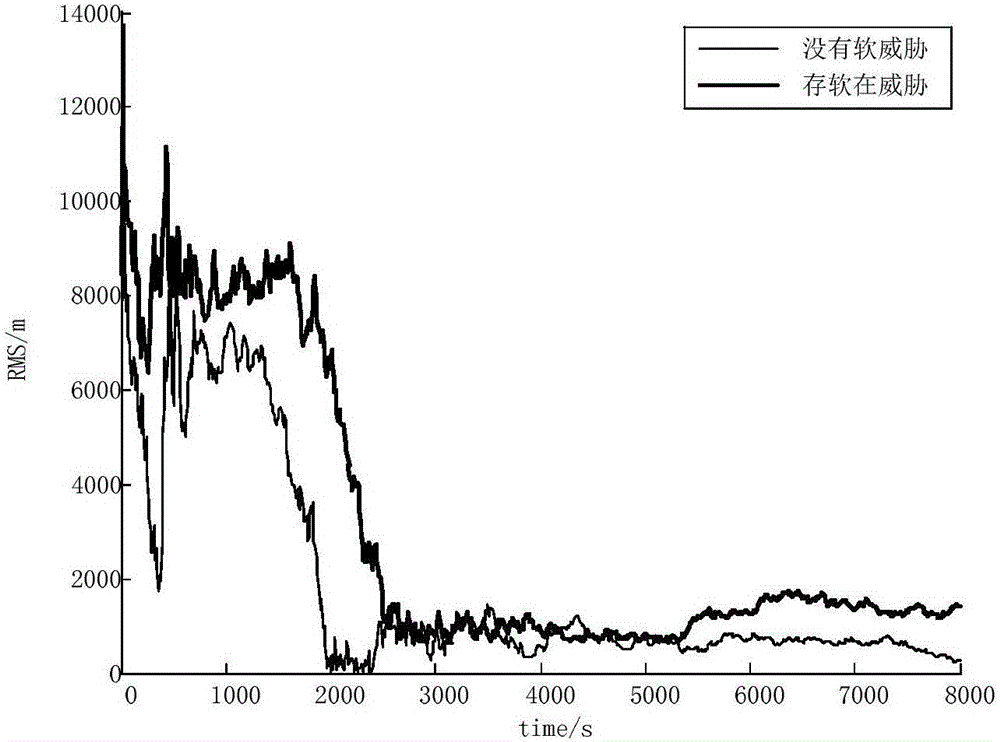
[0024] 4. Combining with the simulation scene examples, considering the threat of the enemy and the accuracy of target positioning, plan an optimal UAV trajectory.
[0025] The detailed implementation methods of the above-mentioned process steps are described as follows:
[0026] 1. Establish an azimuth-only positioning model for a single UAV.
[0027] A moving UAV conducts direction finding on the target signal multiple times at different positions, and performs rendezvous positioning through the results of multiple direction finding.
[0028] Assuming that both t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More