AUV horizontal planar path tracking control method based on neural dynamic model and backstepping method
A neural dynamic and path tracking technology, applied in non-electric variable control, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve cumbersome derivation calculations, neural network compensation model uncertainty, Unable to achieve AUV tracking global convergence and other issues, to achieve the effect of improving control accuracy and avoiding parameter explosion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
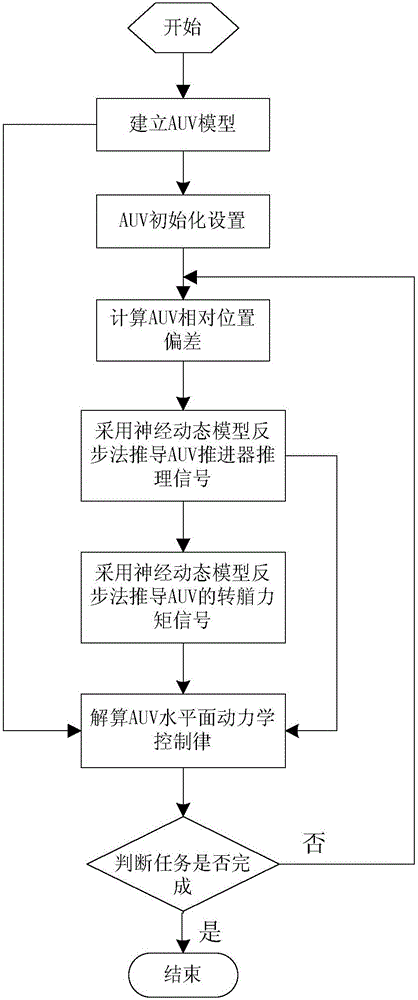
[0028] The specific implementation mode one, the AUV horizontal plane path tracking control method based on neural dynamic model backstepping method, concrete implementation is as follows:
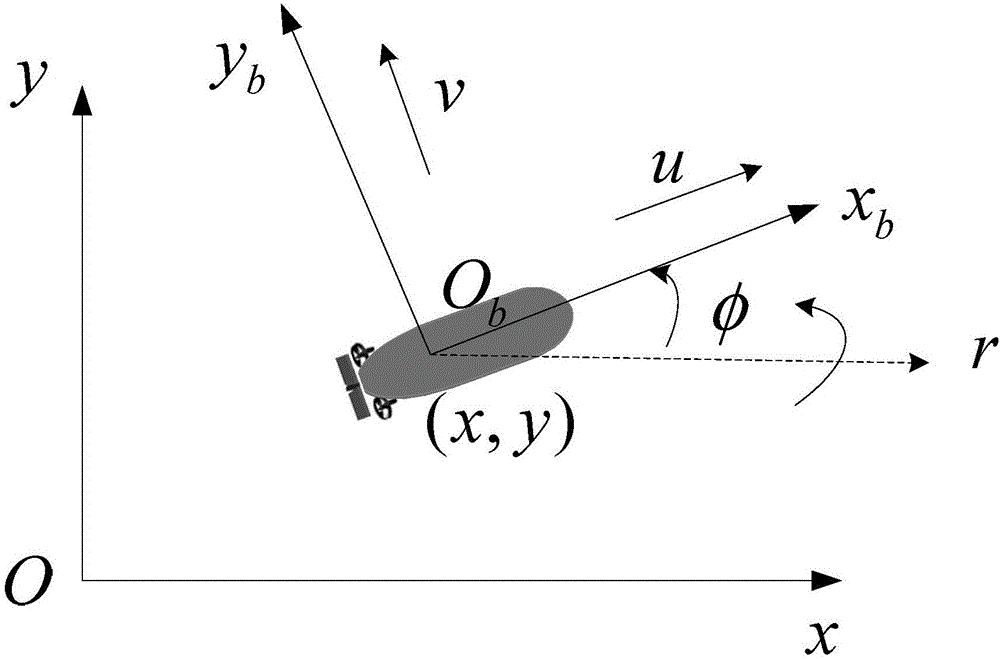
[0029] In step 1, the described three-degree-of-freedom dynamics model of the horizontal plane of establishing AUV:
[0030] u · = m 22 m 11 v r - d 11 m 11 u + 1 m 11 F ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More