

Visual navigation method and system of glass curtain wall cleaning robot
A technology for cleaning robots and glass curtain walls, which is applied in the field of robot navigation and can solve the problems of glass curtain wall robots being difficult to work continuously with multiple glass surfaces.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the purposes, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments These are some embodiments of the present invention, but not all embodiments.
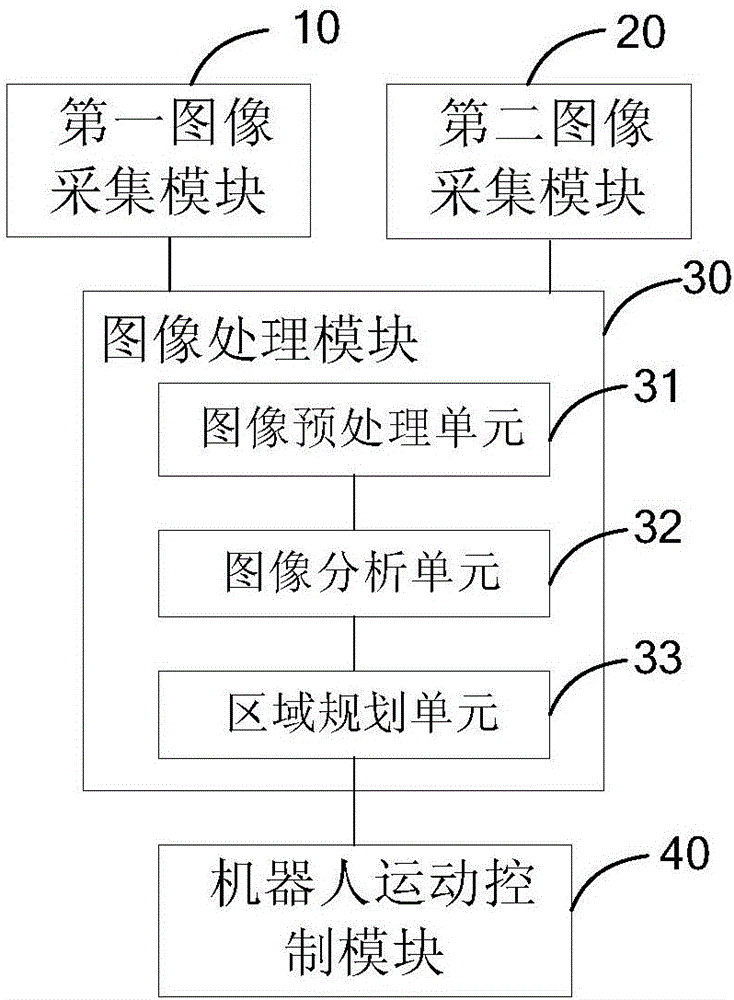
[0036] The invention discloses a visual navigation system of a glass curtain wall cleaning robot, such as figure 1 As shown, the system may include a first image acquisition module 10, a second image acquisition module 20, an image processing module 30 and a robot motion control module 40, wherein:
[0037] The first image acquisition module 10 is used to acquire the overall wall image information of the glass curtain wall to be cleaned;
[0038] The image processing module 30 is used for preprocessing and image analysis on the image inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More