Underwater glider attitude control algorithm based on fuzzy PID
An underwater glider and attitude control technology, which is applied to attitude control, controllers with specific characteristics, electric controllers, etc., can solve the problem that the control effect cannot meet the control index well, the attitude angle of the glider cannot be controlled in real time, and it takes a long time and other problems to achieve the effect of excellent control effect, short test cycle and shortened adjustment time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] 1. Fuzzy PID control block diagram design:
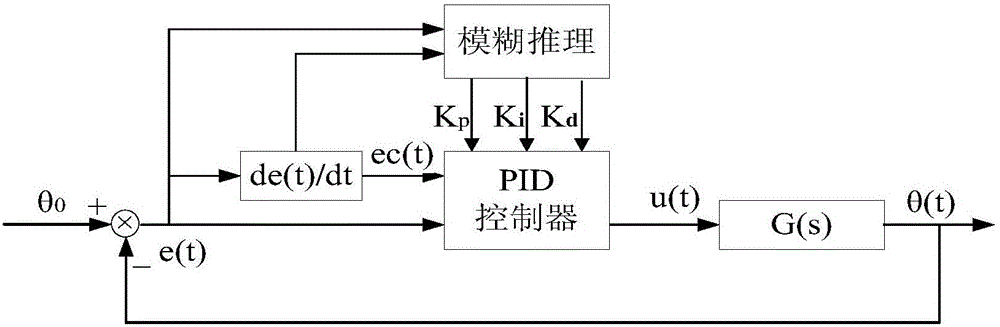
[0046] figure 1 The block diagram of the fuzzy PID control system is depicted. The system input is the set attitude angle of the glider, and the output is the current attitude angle of the glider, which is fed back to the input end, and the error is obtained by making a difference with the set value, and the error change rate is obtained through differential processing. The error and error rate of change are used as the input of the fuzzy PID controller, and the output of the controller acts on the body of the underwater glider, which is the attitude angle transfer function in the control block diagram. Among them, the fuzzy inference adjusts the proportional, integral and differential gains in real time.
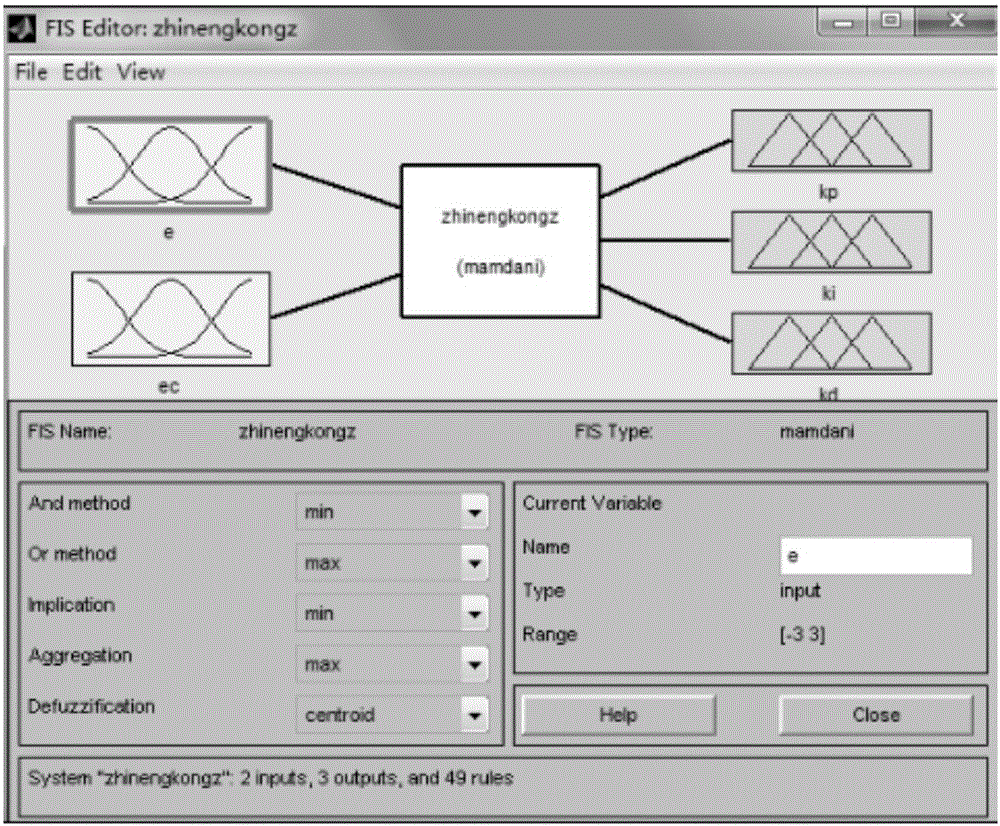
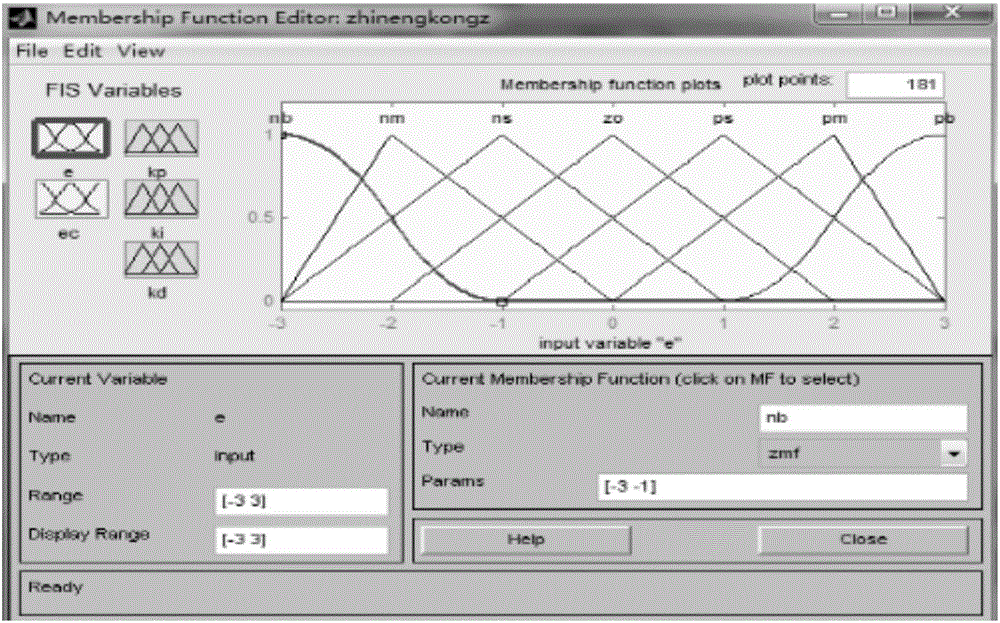
[0047] 2. Fuzzy PID controller design:
[0048] When designing a fuzzy PID controller, it is first necessary to carry out fuzzy processing and knowledge base configuration. Design a dead zone of 0.05 and a saturation zo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More