

Indoor floor positioning method based on TOA (Time Of Arrival)
A positioning method and floor technology, applied in the direction of electrical components, wireless communication, etc., can solve the problems that are not suitable for large-scale promotion and application, time-consuming, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0077] In the first implementation example, the true height h where the MT to be located is located 0 =11.3m.
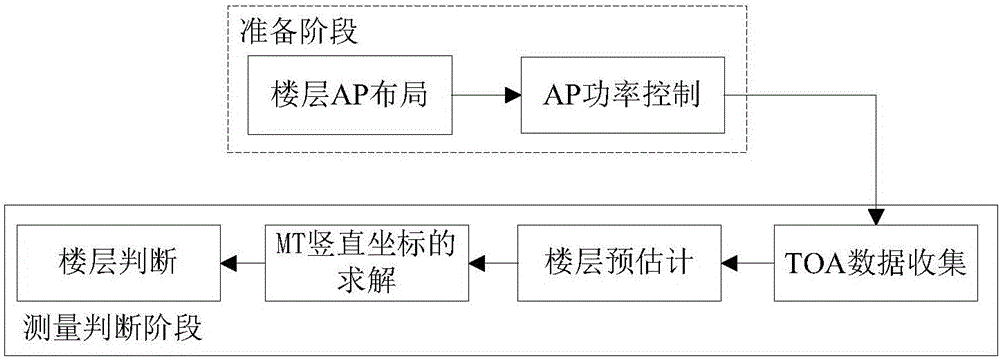
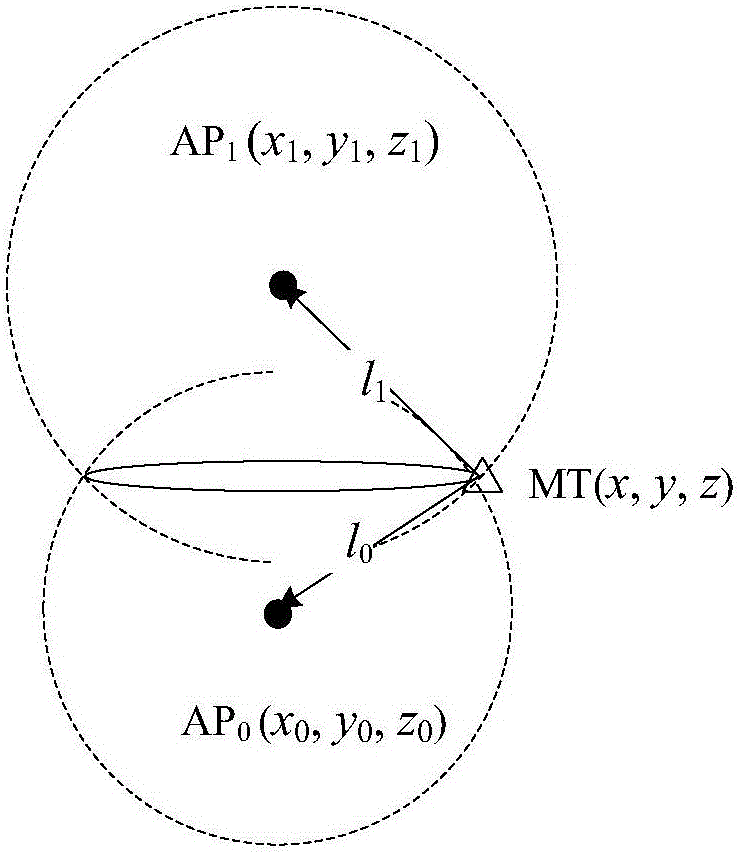
[0078] Step 1. The APs are laid out according to step 1, and the coordinates of the 4 APs are AP 1 (0, 0, 3.5), AP 2 (0.1, 0.2, 8.5), AP 3 (0.2, 0.1, 13.5), AP 4 (0.1, 0.1, 18.5), only consider the case where there is only one AP on each floor (the positioning method remains unchanged when multiple APs are arranged on each floor, and will not be discussed additionally) and the AP power control is as described in step 2;
[0079] Step 2. After the MT is connected to the wireless network in the mall, it receives wireless signals from 3 APs, namely the AP 2 , AP 3 and AP 4 , these three APs can form two groups of positioning APs: APs 2 with AP 3 and AP 3 with AP 4 , among them, the group of APs with the highest signal strength is the AP 2 with AP 3 ;
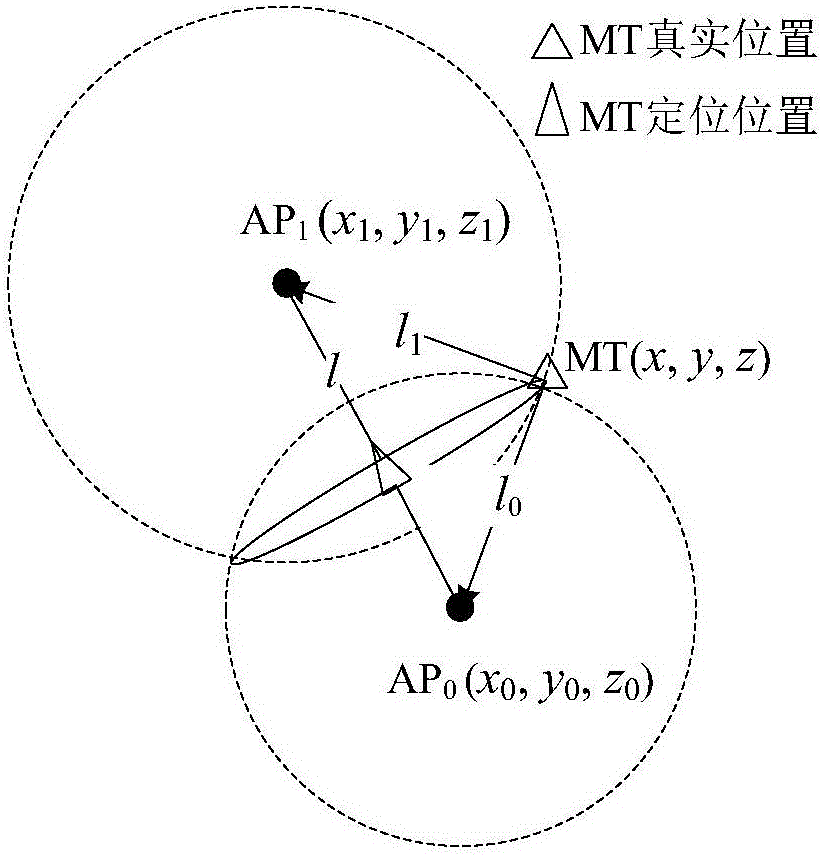
[0080] Step 3. Select with AP 2 with AP 3 Participate in positioning, and calculate the time t for the w...
Embodiment 2
[0086] In the second implementation example, the true height h where the MT to be located is located 0 =11.5m.
[0087] Step 1. The APs are laid out according to step 1, and the coordinates of the 4 APs are AP 1 (0, 0, 3.5), AP 2 (0.1, 0.4, 8.5), AP 3 (0.1, 0.2, 13.5), AP 4 (0.2, 0.2, 18.5), only consider the case where there is only one AP on each floor (the positioning method remains unchanged when multiple APs are arranged on each floor, and will not be discussed additionally) and the AP power control is as described in step 2;
[0088] Step 2. After the MT is connected to the wireless network in the mall, it receives wireless signals from 3 APs, namely the AP 2 , AP 3 and AP 4 , these three APs can form two groups of positioning APs: APs 2 with AP 3 and AP 3 with AP 4 , among them, the group of APs with the highest signal strength is the AP 2 with AP 3 ;
[0089] Step 3. Select with AP 2 with AP 3Participate in positioning, and calculate the time t for the w...
Embodiment 3
[0095] In the third implementation example, the true height h where the MT to be located is located 0 =10.8m.
[0096] Step 1. The APs are laid out according to step 1, and the coordinates of the 4 APs are AP 1 (0, 0, 3.5), AP 2 (0.2, 0.3, 8.5), AP 3 (0.1, 0.1, 13.5), AP 4 (0.1, 0.2, 18.5), only consider the case where there is only one AP on each floor (the positioning method remains unchanged when multiple APs are arranged on each floor, and will not be discussed additionally) and the AP power control is as described in step 2;
[0097] Step 2. After the MT is connected to the wireless network in the mall, it receives wireless signals from 3 APs, namely the AP 2 , AP 3 and AP 4 , these three APs can form two groups of positioning APs: APs 2 with AP 3 and AP 3 with AP 4 , among them, the group of APs with the highest signal strength is the AP 3 with AP 4 ;
[0098] Step 3. Select with AP 3 with AP 4 Participate in positioning, and calculate the time t for the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More