

A flexible grinding angle grinder device for the end of a robot
An angle grinder and angle grinding technology, which is applied in the direction of grinder, grinding frame, grinding bed, etc., can solve the problems of increased force on the angle grinder, robot load alarm and shutdown, and no workpiece can be ground. Extend tool life, reduce the cost of grinding consumables, and ensure the effect of grinding quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
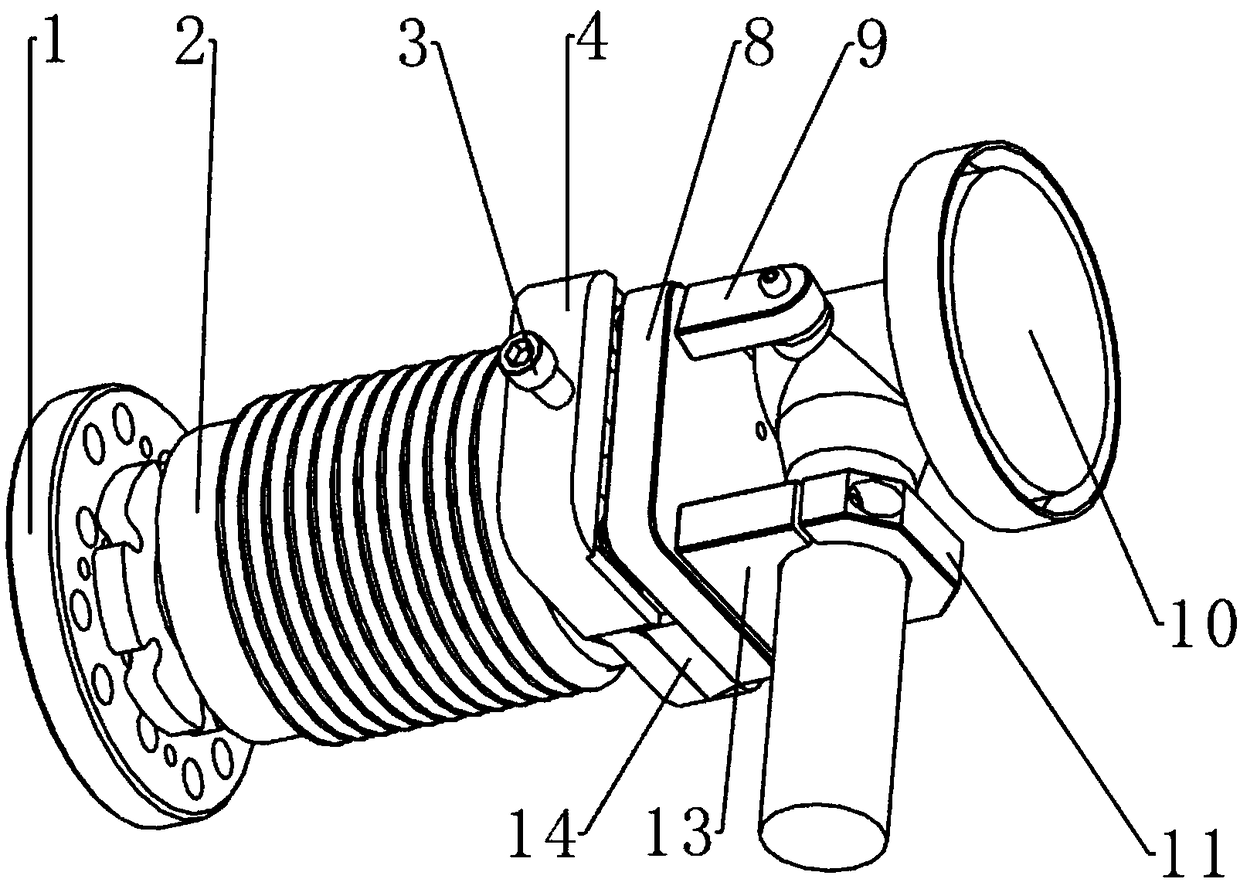
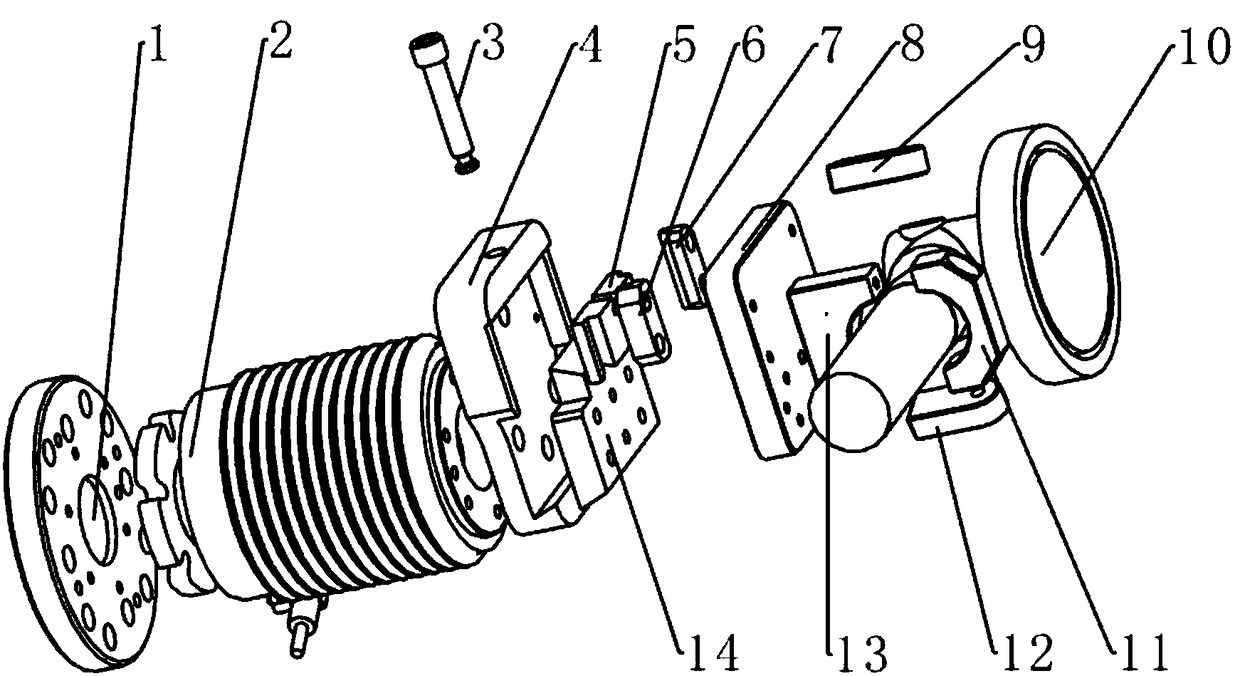
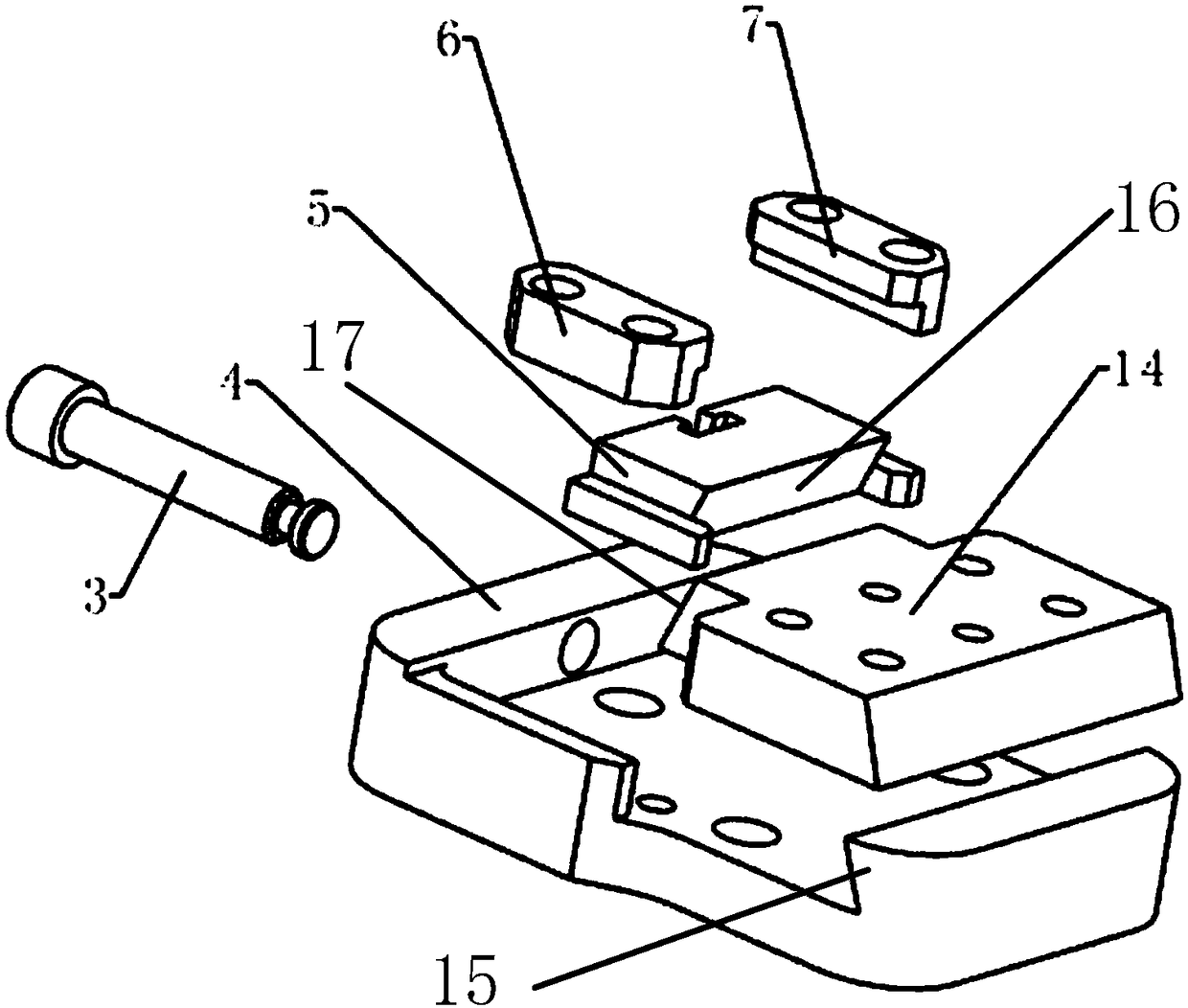
[0032] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
[0033] Such as figure 1 , figure 2 , image 3 as well as Figure 4 As shown, the flexible grinding angle grinder device for the end of the robot provided by the present invention includes an end flange 1 connected to the end of the robot (for example, a six-axis), a flexible flange 2, a manual quick change feed bolt 3, a manual quick change Inner concave block 4, manual quick change sliding block 5, manual quick change left guide fixed block 6, manual quick change right guide fixed block 7, angle gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More