

Robot device and method for locating target
A technology for robots and objects, applied in the field of robots, can solve the problems of weakening reminders, loss, not being able to know the exact orientation and relative distance, etc., to achieve the effect of coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following will clearly and completely describe the technical solutions in the embodiments of the application with reference to the drawings in the embodiments of the application. Apparently, the described embodiments are only some of the embodiments of the application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
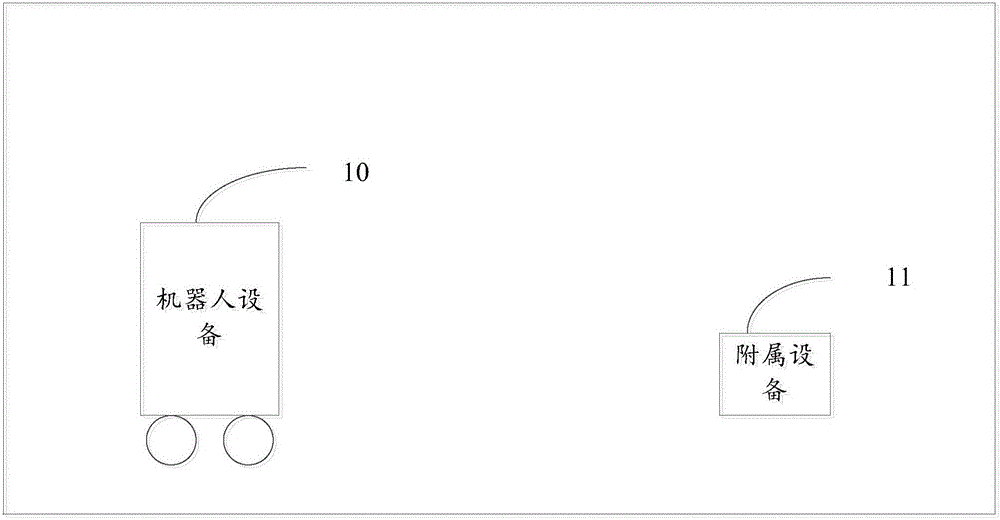
[0022] figure 1 It is an application environment diagram of a specific embodiment of the robot device 10 of the present invention. exist figure 1 , the robot device 10 is in an indoor environment, and it includes at least one target object. In the present invention, we call the target object an accessory device 11. For example, the accessory device 11 can be a charging pile, or it can be a function with a specific function Equipment, such as storage boxes with storage functions. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More