

Robot positioning method
A robot positioning and robot technology, applied in positioning, instruments, measuring devices, etc., can solve problems such as positioning failure, complex image processing, and decreased positioning accuracy, and achieve the effects of reduced number of iterations, shortened iteration time, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Taking the combined global positioning method of service robots based on WiFi (Wireless Fidelity, which is based on IEEE 802.11b standard) fingerprint positioning and particle filter in smart space as an example, the principle of the present invention is described in detail to make its purpose, principle and means clearer. .
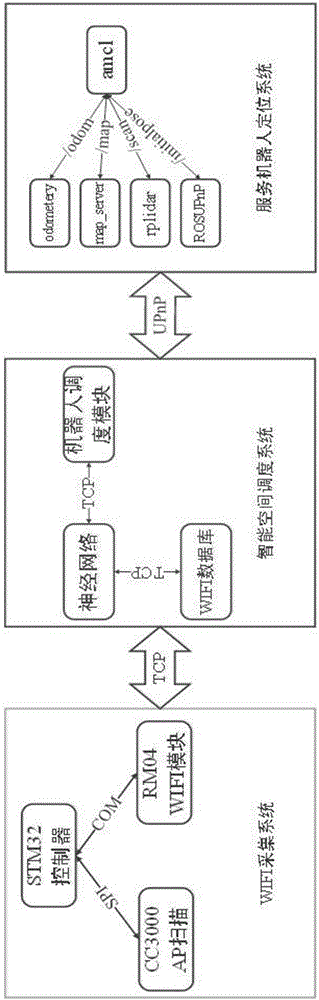
[0043] Such as figure 1As shown, the global positioning system is composed of three parts: WiFi information collection module, intelligent space scheduling system and service robot body. The workflow of the system is described as follows: First, the service robot connected to the wireless LAN based on WiFi through UPnP (Universal Plug and Play) sends a request message to the intelligent space dispatching system. After receiving the request, the intelligent space dispatching system responds to the request. Request, send control information to the WiFi collection module on the service robot, so that the WiFi collection module on the service robot w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More