

TCP online quick calibration method and device applied to industrial robot
A technology of industrial robots and calibration devices, which is applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve problems that affect the production efficiency of industrial robots, consume large human resources, and reduce the overall production capacity of the production line.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
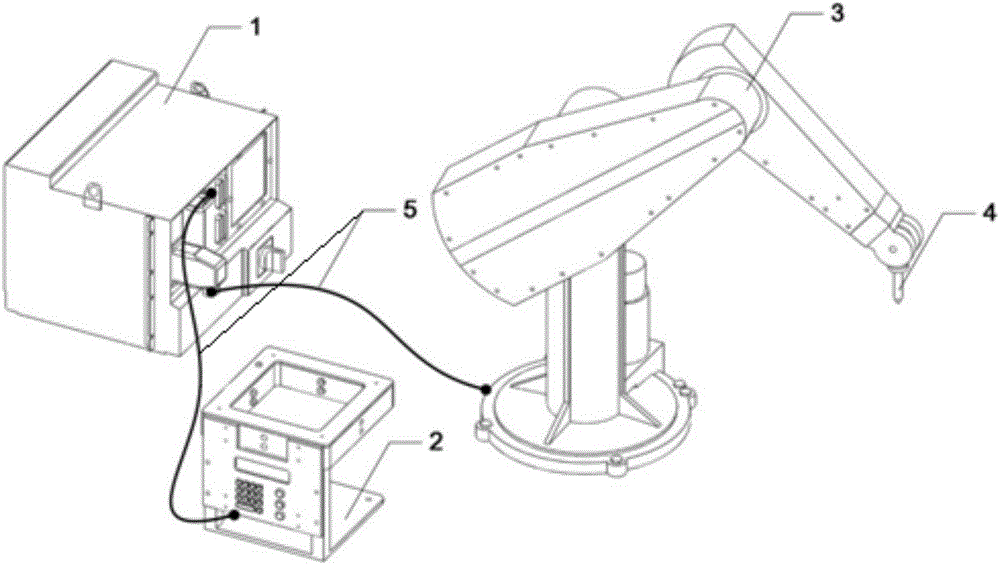
[0066] Such as figure 1 Shown: a TCP online rapid calibration device applied to an industrial robot 3, including a control cabinet 1, a TCP calibration device 2, an industrial robot 3, an end tool 4 and a control bus 5, and the control cabinet 1 is connected to the TCP calibration via the control bus 5 The device 2 and the industrial robot 3, the end tool 4 is installed on the industrial robot 3;
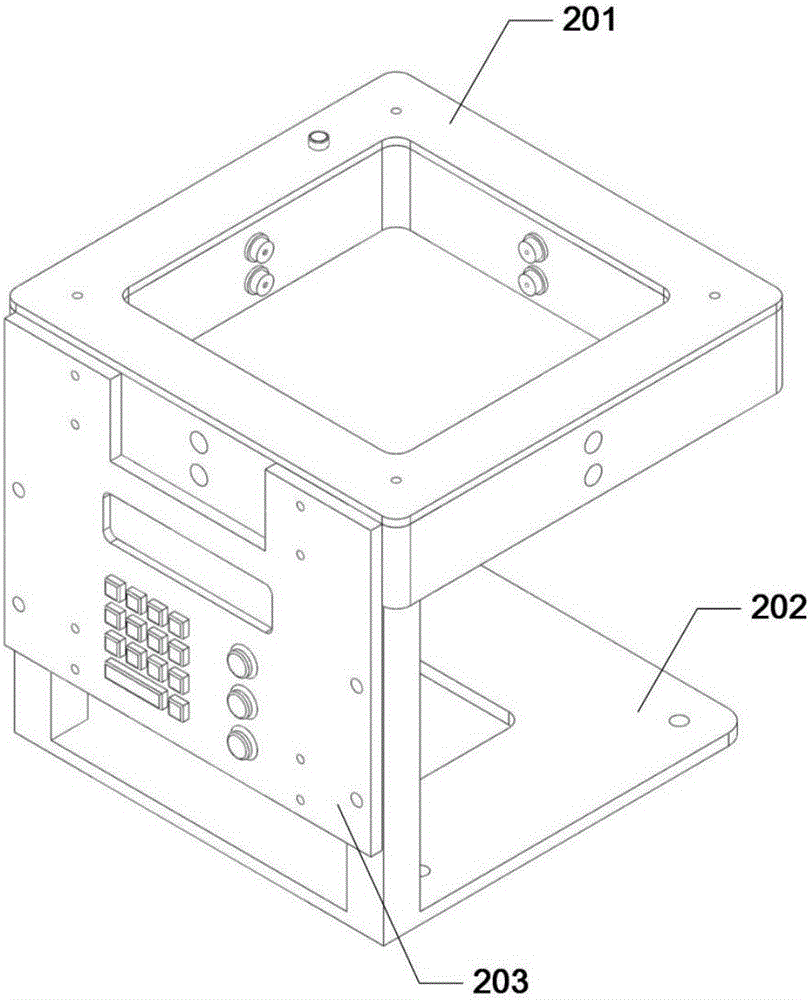
[0067] Such as figure 2 As shown: the TCP calibration device 2 includes a TCP detection device 201, a calibration controller 203 and an installation base 202. The TCP detection device 201 is fixedly installed on one side of the industrial robot 3 through the installation base 202, and the measurement plane and the base coordinate system of the industrial robot 3 The XOY planes are parallel.
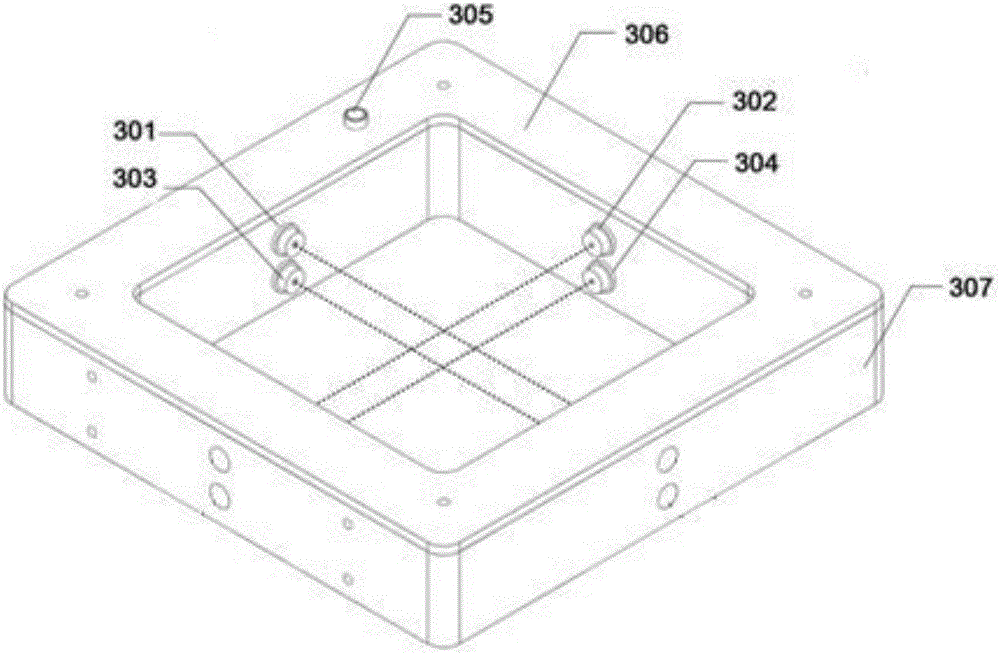
[0068] The laser rays of the through-beam photoelectr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More